 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multimodal Data Fusion Generative Adversarial Network for Real Time Underwater Sound Speed Field Construction
Jul 16, 2025



Sound speed profiles (SSPs) are essential parameters underwater that affects the propagation mode of underwater signals and has a critical impact on the energy efficiency of underwater acoustic communication and accuracy of underwater acoustic positioning. Traditionally, SSPs can be obtained by matching field processing (MFP), compressive sensing (CS), and deep learning (DL) methods. However, existing methods mainly rely on on-site underwater sonar observation data, which put forward strict requirements on the deployment of sonar observation systems. To achieve high-precision estimation of sound velocity distribution in a given sea area without on-site underwater data measurement, we propose a multi-modal data-fusion generative adversarial network model with residual attention block (MDF-RAGAN) for SSP construction. To improve the model's ability for capturing global spatial feature correlations, we embedded the attention mechanisms, and use residual modules for deeply capturing small disturbances in the deep ocean sound velocity distribution caused by changes of SST. Experimental results on real open dataset show that the proposed model outperforms other state-of-the-art methods, which achieves an accuracy with an error of less than 0.3m/s. Specifically, MDF-RAGAN not only outperforms convolutional neural network (CNN) and spatial interpolation (SITP) by nearly a factor of two, but also achieves about 65.8\% root mean square error (RMSE) reduction compared to mean profile, which fully reflects the enhancement of overall profile matching by multi-source fusion and cross-modal attention.
STNet: Prediction of Underwater Sound Speed Profiles with An Advanced Semi-Transformer Neural Network
Apr 24, 2025



Real time acquisition of accurate underwater sound velocity profile (SSP) is crucial for tracking the propagation trajectory of underwater acoustic signals, making it play a key role in ocean communication positioning. SSPs can be directly measured by instruments or inverted leveraging sound field data. Although measurement techniques provide a good accuracy, they are constrained by limited spatial coverage and require substantial time investment. The inversion method based on real-time measurement of acoustic field data improves operational efficiency, but loses the accuracy of SSP estimation and suffers from limited spatial applicability due to its stringent requirements for ocean observation infrastructure. To achieve accurate long-term ocean SSP estimation independent of real-time underwater data measurements, we propose a Semi-Transformer neural network (STNet) specifically designed for simulating sound velocity distribution patterns from the perspective of time series prediction. The proposed network architecture incorporates an optimized self-attention mechanism to effectively capture long-range temporal dependencies within historical sound velocity time-series data, facilitating accurate estimation of current SSPs or prediction of future SSPs. Through architectural optimization of the Transformer framework and integration of a time encoding mechanism, STNet could effectively improve computational efficiency. Comparative experimental results reveal that STNet outperforms state-of-the-art models in predictive accuracy and maintain good computational efficiency, demonstrating its potential for enabling accurate long-term full-depth ocean SSP forecasting.
Optimal Reference Nodes Deployment for Positioning Seafloor Anchor Nodes
May 24, 2024



Seafloor anchor nodes, which form a geodetic network, are designed to provide surface and underwater users with positioning, navigation and timing (PNT) services. Due to the non-uniform distribution of underwater sound speed, accurate positioning of underwater anchor nodes is a challenge work. Traditional anchor node positioning typically uses cross or circular shapes, however, how to optimize the deployment of reference nodes for positioning underwater anchor nodes considering the variability of sound speed has not yet been studied. This paper focuses on the optimal reference nodes deployment strategies for time--of--arrival (TOA) localization in the three-dimensional (3D) underwater space. We adopt the criterion that minimizing the trace of the inverse Fisher information matrix (FIM) to determine optimal reference nodes deployment with Gaussian measurement noise, which is positive related to the signal propagation path. A comprehensive analysis of optimal reference-target geometries is provided in the general circumstance with no restriction on the number of reference nodes, elevation angle and reference-target range. A new semi-closed form solution is found to detemine the optimal geometries. To demonstrate the findings in this paper, we conducted both simulations and sea trials on underwater anchor node positioning. Both the simulation and experiment results are consistent with theoretical analysis.
Underwater Sound Speed Profile Construction: A Review
Oct 12, 2023



Real--time and accurate construction of regional sound speed profiles (SSP) is important for building underwater positioning, navigation, and timing (PNT) systems as it greatly affect the signal propagation modes such as trajectory. In this paper, we summarizes and analyzes the current research status in the field of underwater SSP construction, and the mainstream methods include direct SSP measurement and SSP inversion. In the direct measurement method, we compare the performance of popular international commercial temperature, conductivity, and depth profilers (CTD). While for the inversion methods, the framework and basic principles of matched field processing (MFP), compressive sensing (CS), and deep learning (DL) for constructing SSP are introduced, and their advantages and disadvantages are compared. The traditional direct measurement method has good accuracy performance, but it usually takes a long time. The proposal of SSP inversion method greatly improves the convenience and real--time performance, but the accuracy is not as good as the direct measurement method. Currently, the SSP inversion relies on sonar observation data, making it difficult to apply to areas that couldn't be covered by underwater observation systems, and these methods are unable to predict the distribution of sound velocity at future times. How to comprehensively utilize multi-source data and provide elastic sound velocity distribution estimation services with different accuracy and real-time requirements for underwater users without sonar observation data is the mainstream trend in future research on SSP construction.
Fast Ray-Tracing-Based Precise Underwater Acoustic Localization without Prior Acknowledgment of Target Depth
Oct 12, 2023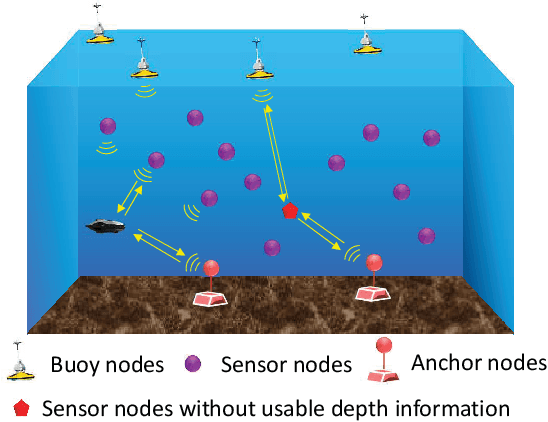
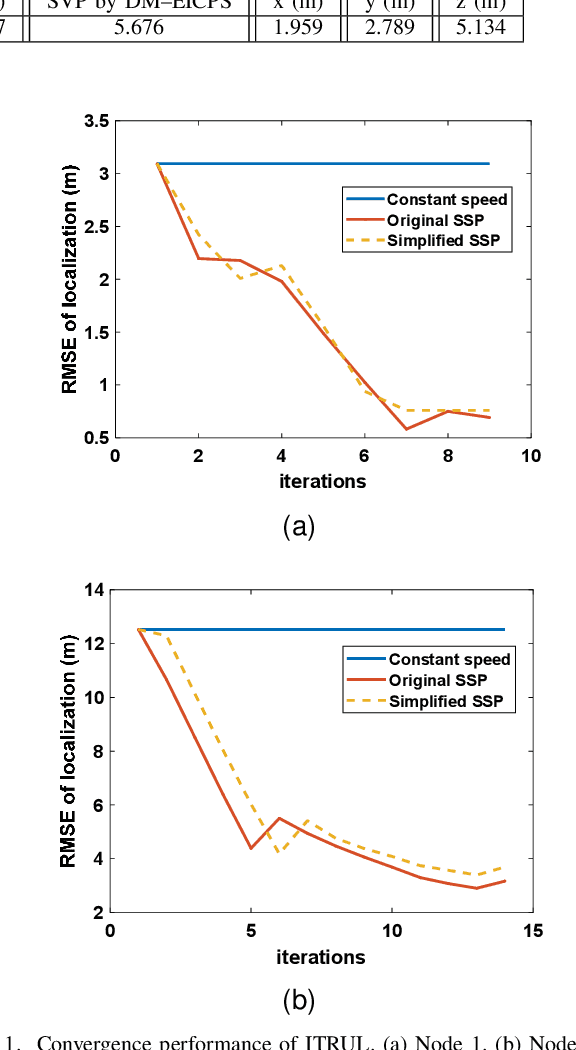
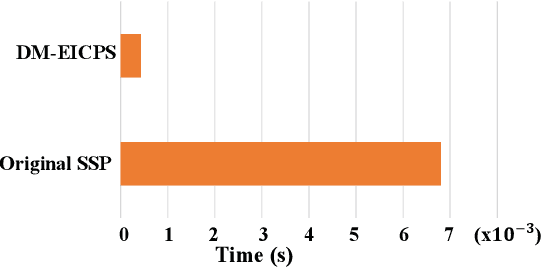
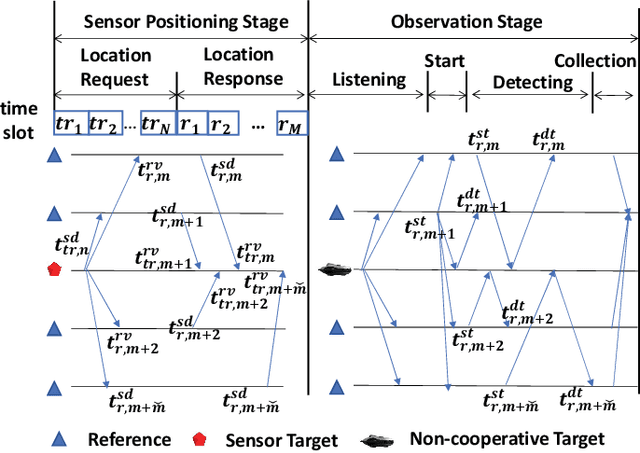
Underwater localization is of great importance for marine observation and building positioning, navigation, timing (PNT) systems that could be widely applied in disaster warning, underwater rescues and resources exploration. The uneven distribution of underwater sound velocity poses great challenge for precise underwater positioning. The current soundline correction positioning method mainly aims at scenarios with known target depth. However, for nodes that are non-cooperative nodes or lack of depth information, soundline tracking strategies cannot work well due to nonunique positional solutions. To tackle this issue, we propose an iterative ray tracing 3D underwater localization (IRTUL) method for stratification compensation. To demonstrate the feasibility of fast stratification compensation, we first derive the signal path as a function of glancing angle, and then prove that the signal propagation time and horizontal propagation distance are monotonic functions of the initial grazing angle, so that fast ray tracing can be achieved. Then, we propose an sound velocity profile (SVP) simplification method, which reduces the computational cost of ray tracing. Experimental results show that the IRTUL has the most significant distance correction in the depth direction, and the average accuracy of IRTUL has been improved by about 3 meters compared to localization model with constant sound velocity. Also, the simplified SVP can significantly improve real-time performance with average accuracy loss less than 0.2 m when used for positioning.