 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLYSTO: The Lymphocyte Assessment Hackathon and Benchmark Dataset
Jan 16, 2023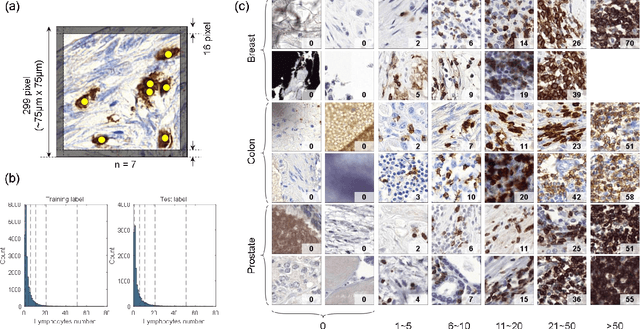
We introduce LYSTO, the Lymphocyte Assessment Hackathon, which was held in conjunction with the MICCAI 2019 Conference in Shenzen (China). The competition required participants to automatically assess the number of lymphocytes, in particular T-cells, in histopathological images of colon, breast, and prostate cancer stained with CD3 and CD8 immunohistochemistry. Differently from other challenges setup in medical image analysis, LYSTO participants were solely given a few hours to address this problem. In this paper, we describe the goal and the multi-phase organization of the hackathon; we describe the proposed methods and the on-site results. Additionally, we present post-competition results where we show how the presented methods perform on an independent set of lung cancer slides, which was not part of the initial competition, as well as a comparison on lymphocyte assessment between presented methods and a panel of pathologists. We show that some of the participants were capable to achieve pathologist-level performance at lymphocyte assessment. After the hackathon, LYSTO was left as a lightweight plug-and-play benchmark dataset on grand-challenge website, together with an automatic evaluation platform. LYSTO has supported a number of research in lymphocyte assessment in oncology. LYSTO will be a long-lasting educational challenge for deep learning and digital pathology, it is available at https://lysto.grand-challenge.org/.
Learning to Control Direct Current Motor for Steering in Real Time via Reinforcement Learning
Jul 31, 2021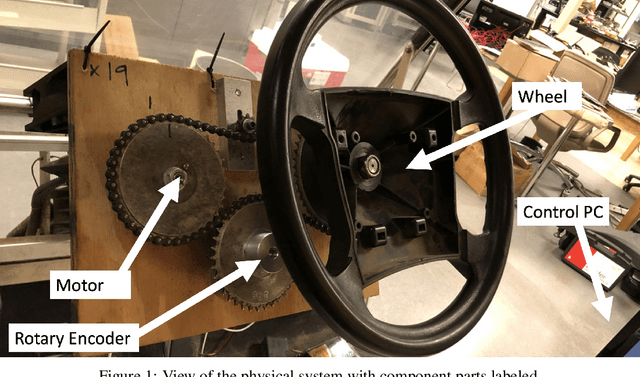
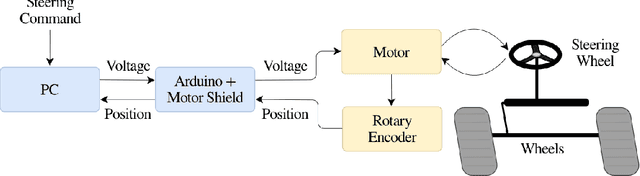
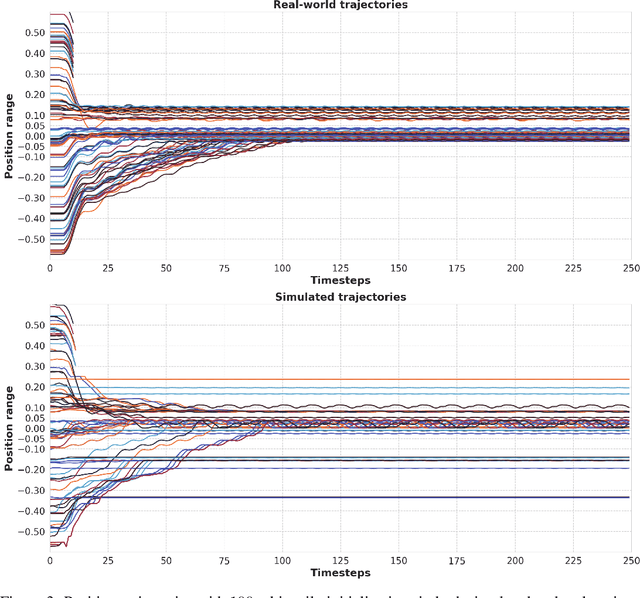
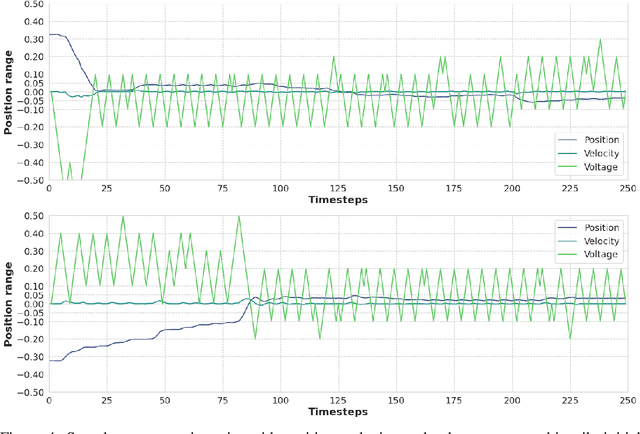
Model free techniques have been successful at optimal control of complex systems at an expense of copious amounts of data and computation. However, it is often desired to obtain a control policy in a short period of time with minimal data use and computational burden. To this end, we make use of the NFQ algorithm for steering position control of a golf cart in both a real hardware and a simulated environment that was built from real-world interaction. The controller learns to apply a sequence of voltage signals in the presence of environmental uncertainties and inherent non-linearities that challenge the the control task. We were able to increase the rate of successful control under four minutes in simulation and under 11 minutes in real hardware.