 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Control Direct Current Motor for Steering in Real Time via Reinforcement Learning
Paper and Code
Jul 31, 2021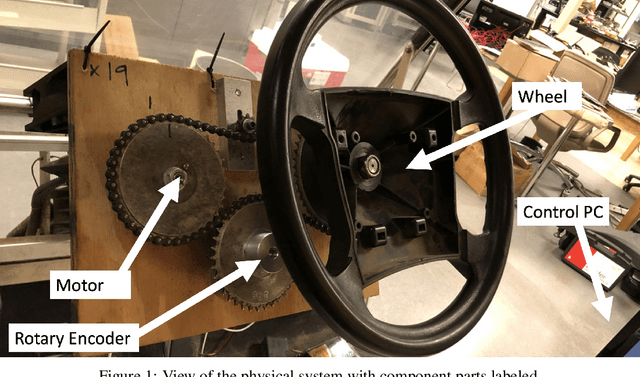
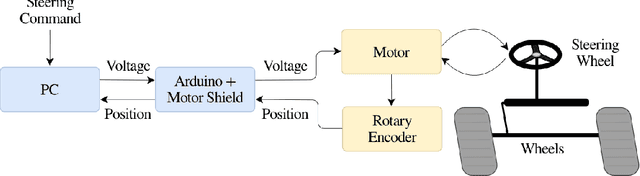
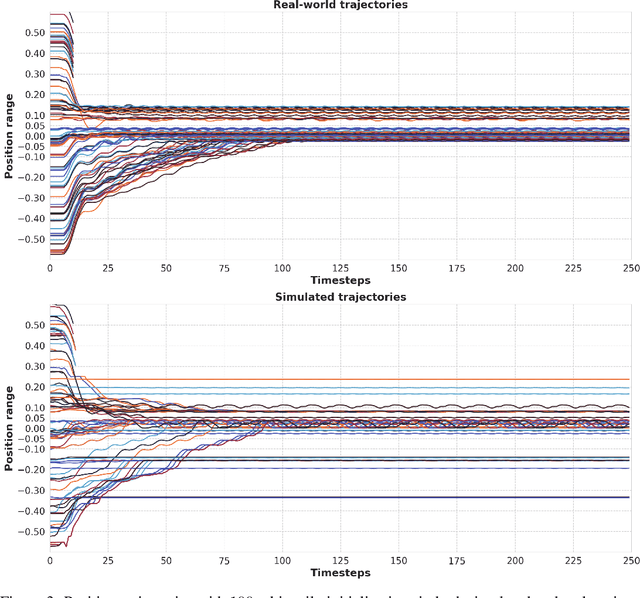
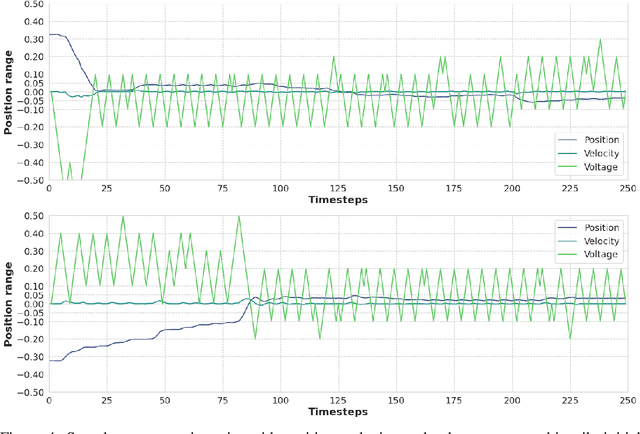
Model free techniques have been successful at optimal control of complex systems at an expense of copious amounts of data and computation. However, it is often desired to obtain a control policy in a short period of time with minimal data use and computational burden. To this end, we make use of the NFQ algorithm for steering position control of a golf cart in both a real hardware and a simulated environment that was built from real-world interaction. The controller learns to apply a sequence of voltage signals in the presence of environmental uncertainties and inherent non-linearities that challenge the the control task. We were able to increase the rate of successful control under four minutes in simulation and under 11 minutes in real hardware.