 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards representation agnostic probabilistic programming
Dec 25, 2025Current probabilistic programming languages and tools tightly couple model representations with specific inference algorithms, preventing experimentation with novel representations or mixed discrete-continuous models. We introduce a factor abstraction with five fundamental operations that serve as a universal interface for manipulating factors regardless of their underlying representation. This enables representation-agnostic probabilistic programming where users can freely mix different representations (e.g. discrete tables, Gaussians distributions, sample-based approaches) within a single unified framework, allowing practical inference in complex hybrid models that current toolkits cannot adequately express.
Towards Measuring Ethicality of an Intelligent Assistive System
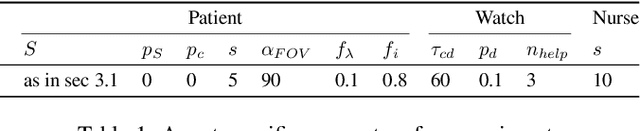
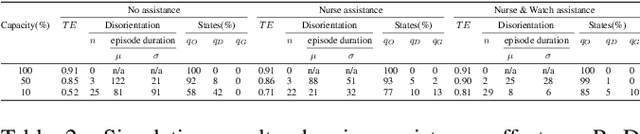
Feb 28, 2023Artificial intelligence (AI) based assistive systems, so called intelligent assistive technology (IAT) are becoming increasingly ubiquitous by each day. IAT helps people in improving their quality of life by providing intelligent assistance based on the provided data. A few examples of such IATs include self-driving cars, robot assistants and smart-health management solutions. However, the presence of such autonomous entities poses ethical challenges concerning the stakeholders involved in using these systems. There is a lack of research when it comes to analysing how such IAT adheres to provided ethical regulations due to ethical, logistic and cost issues associated with such an analysis. In the light of the above-mentioned problem statement and issues, we present a method to measure the ethicality of an assistive system. To perform this task, we utilised our simulation tool that focuses on modelling navigation and assistance of Persons with Dementia (PwD) in indoor environments. By utilising this tool, we analyse how well different assistive strategies adhere to provided ethical regulations such as autonomy, justice and beneficence of the stakeholders.
Discovering Behavioral Predispositions in Data to Improve Human Activity Recognition
Jul 18, 2022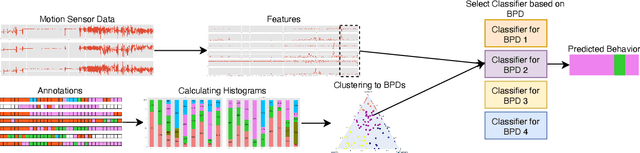
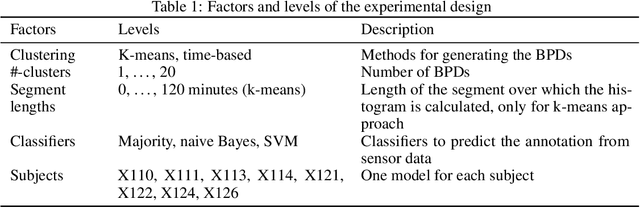
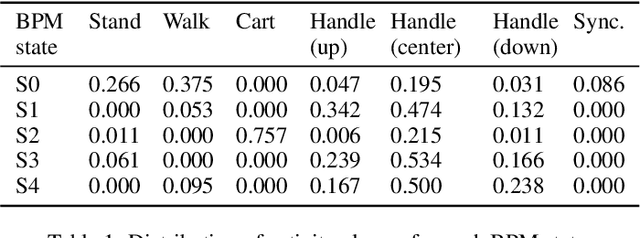
The automatic, sensor-based assessment of challenging behavior of persons with dementia is an important task to support the selection of interventions. However, predicting behaviors like apathy and agitation is challenging due to the large inter- and intra-patient variability. Goal of this paper is to improve the recognition performance by making use of the observation that patients tend to show specific behaviors at certain times of the day or week. We propose to identify such segments of similar behavior via clustering the distributions of annotations of the time segments. All time segments within a cluster then consist of similar behaviors and thus indicate a behavioral predisposition (BPD). We utilize BPDs by training a classifier for each BPD. Empirically, we demonstrate that when the BPD per time segment is known, activity recognition performance can be substantially improved.
Activity Recognition in Assembly Tasks by Bayesian Filtering in Multi-Hypergraphs
Feb 01, 2022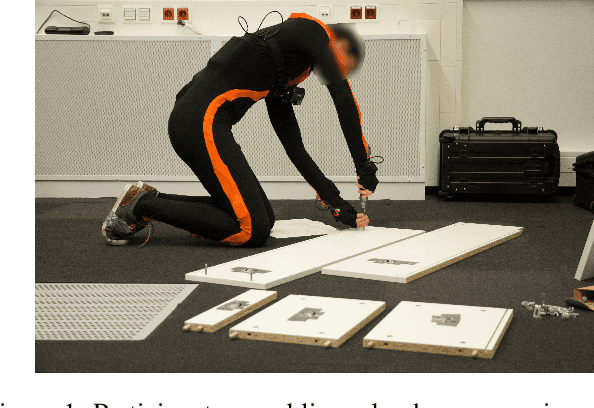
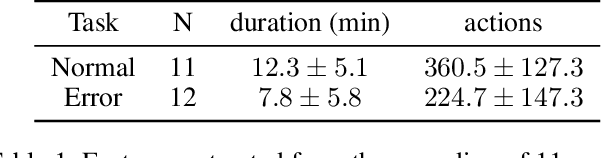
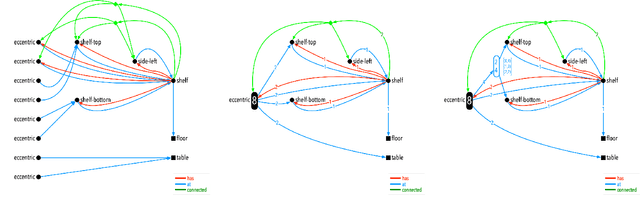
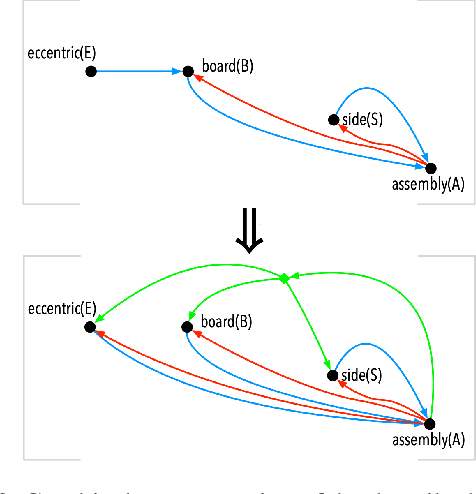
We study sensor-based human activity recognition in manual work processes like assembly tasks. In such processes, the system states often have a rich structure, involving object properties and relations. Thus, estimating the hidden system state from sensor observations by recursive Bayesian filtering can be very challenging, due to the combinatorial explosion in the number of system states. To alleviate this problem, we propose an efficient Bayesian filtering model for such processes. In our approach, system states are represented by multi-hypergraphs, and the system dynamics is modeled by graph rewriting rules. We show a preliminary concept that allows to represent distributions over multi-hypergraphs more compactly than by full enumeration, and present an inference algorithm that works directly on this compact representation. We demonstrate the applicability of the algorithm on a real dataset.
Human Activity Recognition using Attribute-Based Neural Networks and Context Information
Oct 28, 2021
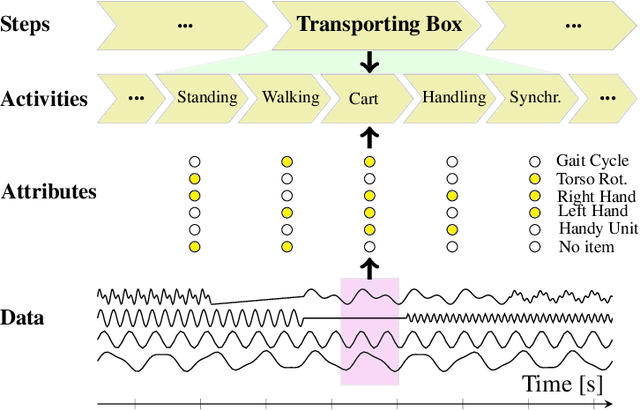
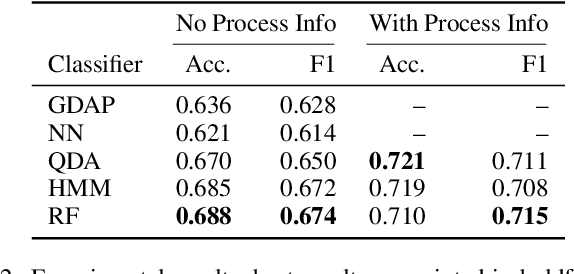
We consider human activity recognition (HAR) from wearable sensor data in manual-work processes, like warehouse order-picking. Such structured domains can often be partitioned into distinct process steps, e.g., packaging or transporting. Each process step can have a different prior distribution over activity classes, e.g., standing or walking, and different system dynamics. Here, we show how such context information can be integrated systematically into a deep neural network-based HAR system. Specifically, we propose a hybrid architecture that combines a deep neural network-that estimates high-level movement descriptors, attributes, from the raw-sensor data-and a shallow classifier, which predicts activity classes from the estimated attributes and (optional) context information, like the currently executed process step. We empirically show that our proposed architecture increases HAR performance, compared to state-of-the-art methods. Additionally, we show that HAR performance can be further increased when information about process steps is incorporated, even when that information is only partially correct.
SimDem A Multi-agent Simulation Environment to Model Persons with Dementia and their Assistance
Jul 12, 2021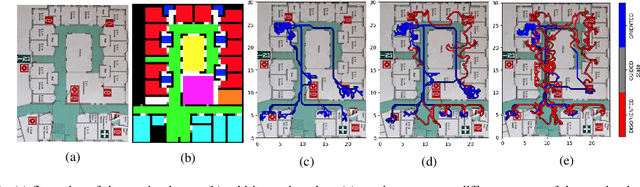
Developing artificial intelligence based assistive systems to aid Persons with Dementia (PwD) requires large amounts of training data. However, data collection poses ethical, legal, economic, and logistic issues. Synthetic data generation tools, in this regard, provide a potential solution. However, we believe that already available such tools do not adequately reflect cognitive deficiencies in behavior simulation. To counter these issues we propose a simulation model (SimDem ) that primarily focuses on cognitive impairments suffered by PwD and can be easily configured and adapted by the users to model and evaluate assistive solutions.
Lifted Filtering via Exchangeable Decomposition
May 07, 2018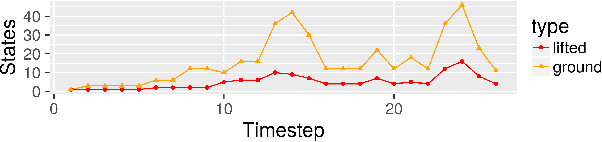
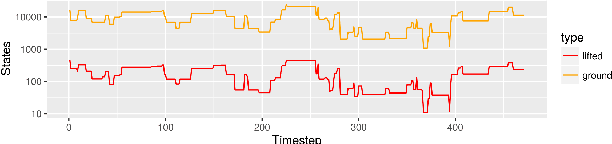
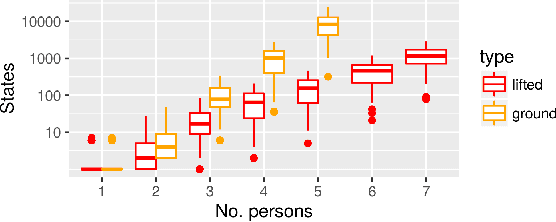
We present a model for exact recursive Bayesian filtering based on lifted multiset states. Combining multisets with lifting makes it possible to simultaneously exploit multiple strategies for reducing inference complexity when compared to list-based grounded state representations. The core idea is to borrow the concept of Maximally Parallel Multiset Rewriting Systems and to enhance it by concepts from Rao-Blackwellization and Lifted Inference, giving a representation of state distributions that enables efficient inference. In worlds where the random variables that define the system state are exchangeable -- where the identity of entities does not matter -- it automatically uses a representation that abstracts from ordering (achieving an exponential reduction in complexity) -- and it automatically adapts when observations or system dynamics destroy exchangeability by breaking symmetry.
State-Space Abstractions for Probabilistic Inference: A Systematic Review
Apr 23, 2018
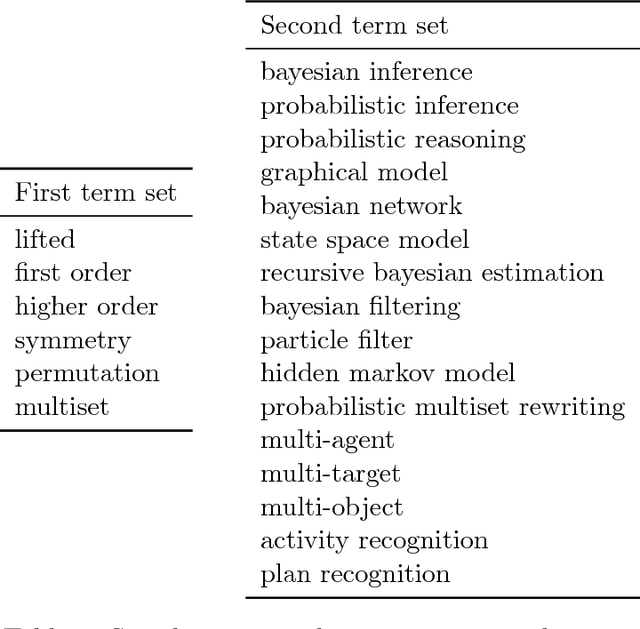
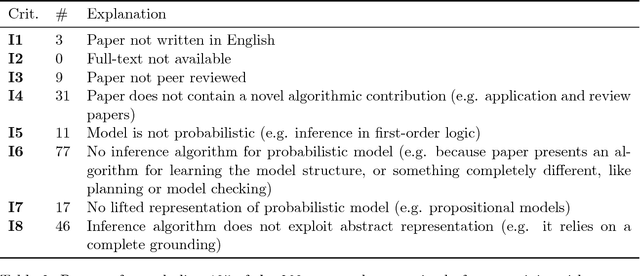
Tasks such as social network analysis, human behavior recognition, or modeling biochemical reactions, can be solved elegantly by using the probabilistic inference framework. However, standard probabilistic inference algorithms work at a propositional level, and thus cannot capture the symmetries and redundancies that are present in these tasks. Algorithms that exploit those symmetries have been devised in different research fields, for example by the lifted inference-, multiple object tracking-, and modeling and simulation-communities. The common idea, that we call state space abstraction, is to perform inference over compact representations of sets of symmetric states. Although they are concerned with a similar topic, the relationship between these approaches has not been investigated systematically. This survey provides the following contributions. We perform a systematic literature review to outline the state of the art in probabilistic inference methods exploiting symmetries. From an initial set of more than 4,000 papers, we identify 116 relevant papers. Furthermore, we provide new high-level categories that classify the approaches, based on the problem classes the different approaches can solve. Researchers from different fields that are confronted with a state space explosion problem in a probabilistic system can use this classification to identify possible solutions. Finally, based on this conceptualization, we identify potentials for future research, as some relevant application domains are not addressed by current approaches.
Sequential Lifted Bayesian Filtering in Multiset Rewriting Systems
Aug 14, 2017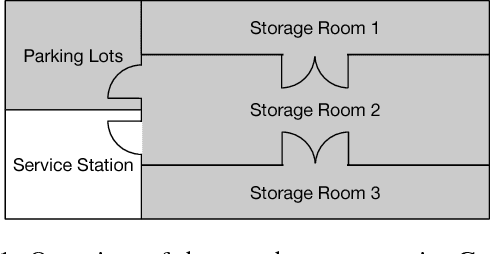
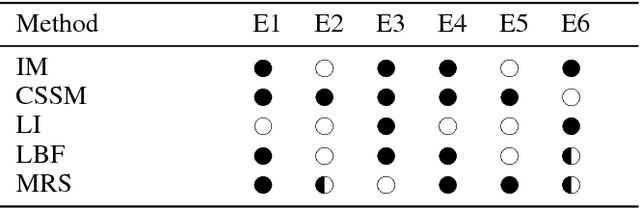
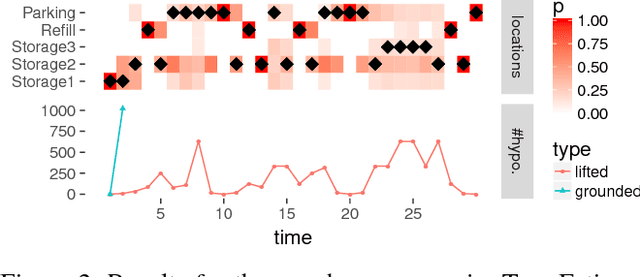
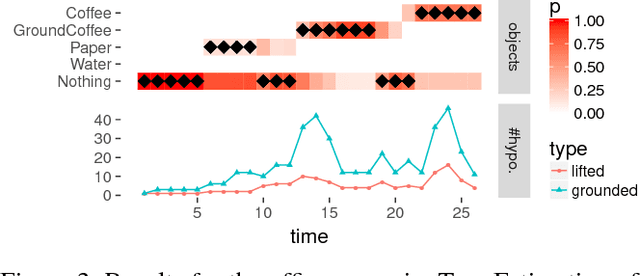
Bayesian Filtering for plan and activity recognition is challenging for scenarios that contain many observation equivalent entities (i.e. entities that produce the same observations). This is due to the combinatorial explosion in the number of hypotheses that need to be tracked. However, this class of problems exhibits a certain symmetry that can be exploited for state space representation and inference. We analyze current state of the art methods and find that none of them completely fits the requirements arising in this problem class. We sketch a novel inference algorithm that provides a solution by incorporating concepts from Lifted Inference algorithms, Probabilistic Multiset Rewriting Systems, and Computational State Space Models. Two experiments confirm that this novel algorithm has the potential to perform efficient probabilistic inference on this problem class.