 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOverview: A Hierarchical Framework for Plan Generation and Execution in Multi-Robot Systems
Mar 30, 2018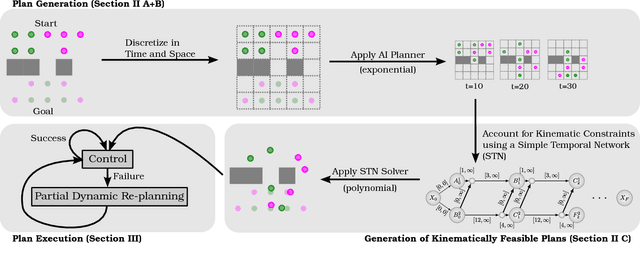
The authors present an overview of a hierarchical framework for coordinating task- and motion-level operations in multirobot systems. Their framework is based on the idea of using simple temporal networks to simultaneously reason about precedence/causal constraints required for task-level coordination and simple temporal constraints required to take some kinematic constraints of robots into account. In the plan-generation phase, the framework provides a computationally scalable method for generating plans that achieve high-level tasks for groups of robots and take some of their kinematic constraints into account. In the plan-execution phase, the framework provides a method for absorbing an imperfect plan execution to avoid time-consuming re-planning in many cases. The authors use the multirobot path-planning problem as a case study to present the key ideas behind their framework for the long-term autonomy of multirobot systems.
The FastMap Algorithm for Shortest Path Computations
Dec 21, 2017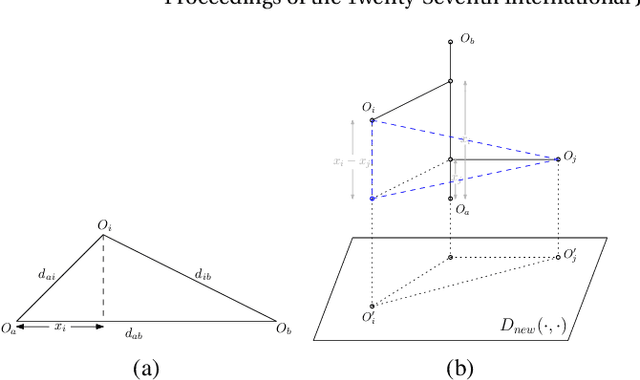

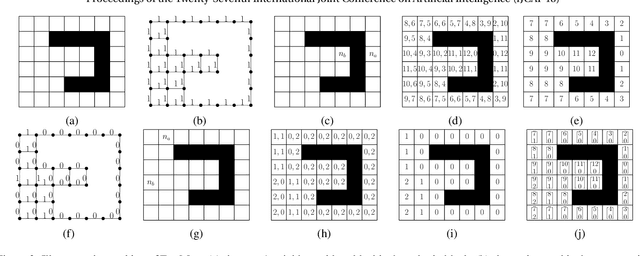
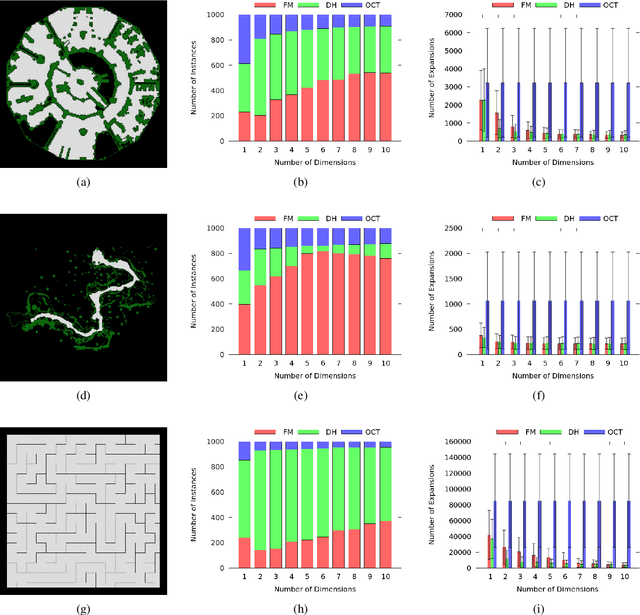
We present a new preprocessing algorithm for embedding the nodes of a given edge-weighted undirected graph into a Euclidean space. The Euclidean distance between any two nodes in this space approximates the length of the shortest path between them in the given graph. Later, at runtime, a shortest path between any two nodes can be computed with A* search using the Euclidean distances as heuristic. Our preprocessing algorithm, called FastMap, is inspired by the data mining algorithm of the same name and runs in near-linear time. Hence, FastMap is orders of magnitude faster than competing approaches that produce a Euclidean embedding using Semidefinite Programming. FastMap also produces admissible and consistent heuristics and therefore guarantees the generation of shortest paths. Moreover, FastMap applies to general undirected graphs for which many traditional heuristics, such as the Manhattan Distance heuristic, are not well defined. Empirically, we demonstrate that A* search using the FastMap heuristic is competitive with A* search using other state-of-the-art heuristics, such as the Differential heuristic.
Overview: Generalizations of Multi-Agent Path Finding to Real-World Scenarios
Feb 17, 2017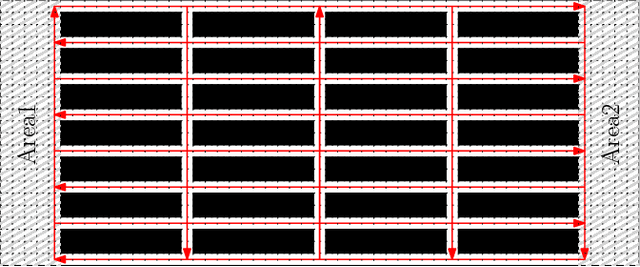
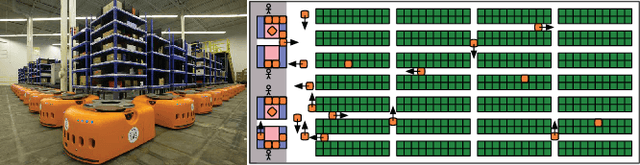
Multi-agent path finding (MAPF) is well-studied in artificial intelligence, robotics, theoretical computer science and operations research. We discuss issues that arise when generalizing MAPF methods to real-world scenarios and four research directions that address them. We emphasize the importance of addressing these issues as opposed to developing faster methods for the standard formulation of the MAPF problem.