 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Liar's Walk: Detecting Deception with Gait and Gesture
Dec 20, 2019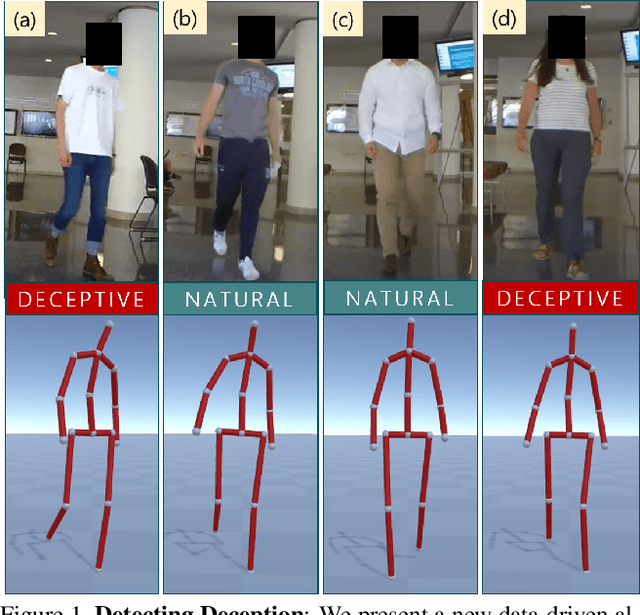
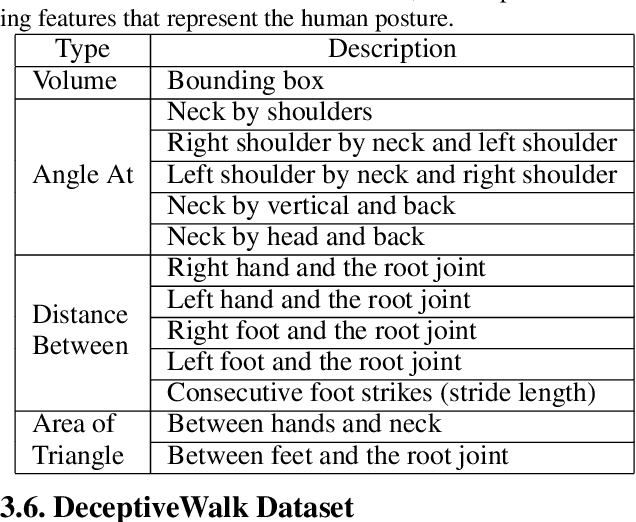
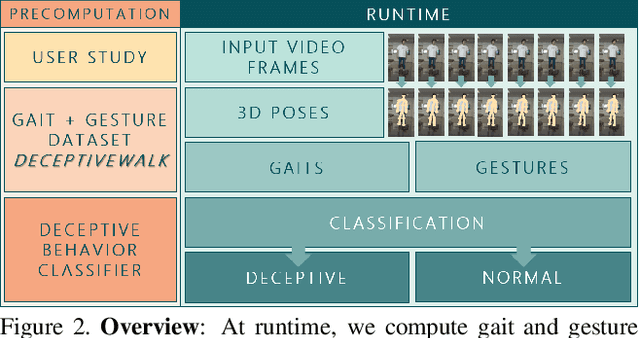
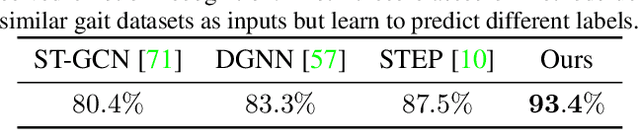
We present a data-driven deep neural algorithm for detecting deceptive walking behavior using nonverbal cues like gaits and gestures. We conducted an elaborate user study, where we recorded many participants performing tasks involving deceptive walking. We extract the participants' walking gaits as series of 3D poses. We annotate various gestures performed by participants during their tasks. Based on the gait and gesture data, we train an LSTM-based deep neural network to obtain deep features. Finally, we use a combination of psychology-based gait, gesture, and deep features to detect deceptive walking with an accuracy of 93.4%. This is an improvement of 16.1% over handcrafted gait and gesture features and an improvement of 5.9% and 10.1% over classifiers based on the state-of-the-art emotion and action classification algorithms, respectively. Additionally, we present a novel dataset, DeceptiveWalk, that contains gaits and gestures with their associated deception labels. To the best of our knowledge, ours is the first algorithm to detect deceptive behavior using non-verbal cues of gait and gesture.
STEP: Spatial Temporal Graph Convolutional Networks for Emotion Perception from Gaits
Oct 28, 2019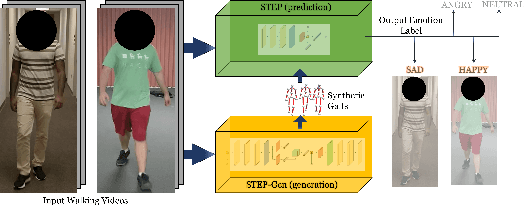
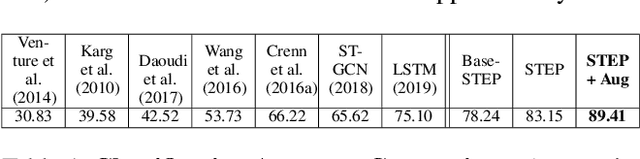
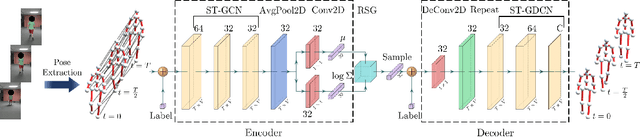
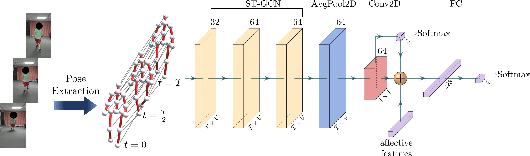
We present a novel classifier network called STEP, to classify perceived human emotion from gaits, based on a Spatial Temporal Graph Convolutional Network (ST-GCN) architecture. Given an RGB video of an individual walking, our formulation implicitly exploits the gait features to classify the emotional state of the human into one of four emotions: happy, sad, angry, or neutral. We use hundreds of annotated real-world gait videos and augment them with thousands of annotated synthetic gaits generated using a novel generative network called STEP-Gen, built on an ST-GCN based Conditional Variational Autoencoder (CVAE). We incorporate a novel push-pull regularization loss in the CVAE formulation of STEP-Gen to generate realistic gaits and improve the classification accuracy of STEP. We also release a novel dataset (E-Gait), which consists of $2,177$ human gaits annotated with perceived emotions along with thousands of synthetic gaits. In practice, STEP can learn the affective features and exhibits classification accuracy of 89% on E-Gait, which is 14 - 30% more accurate over prior methods.
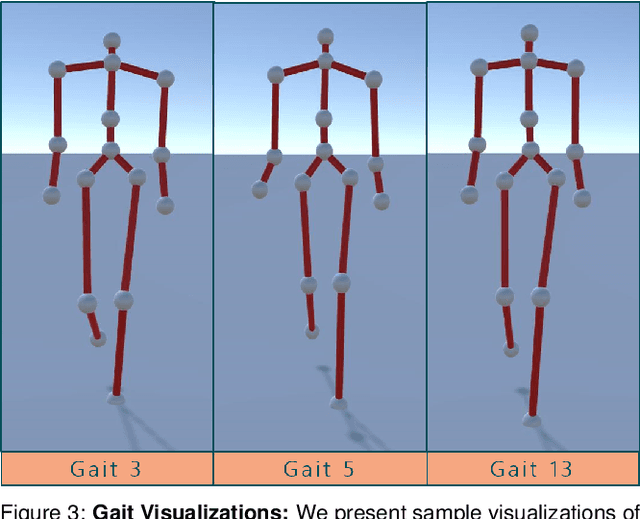
Identifying Emotions from Walking using Affective and Deep Features
Jul 21, 2019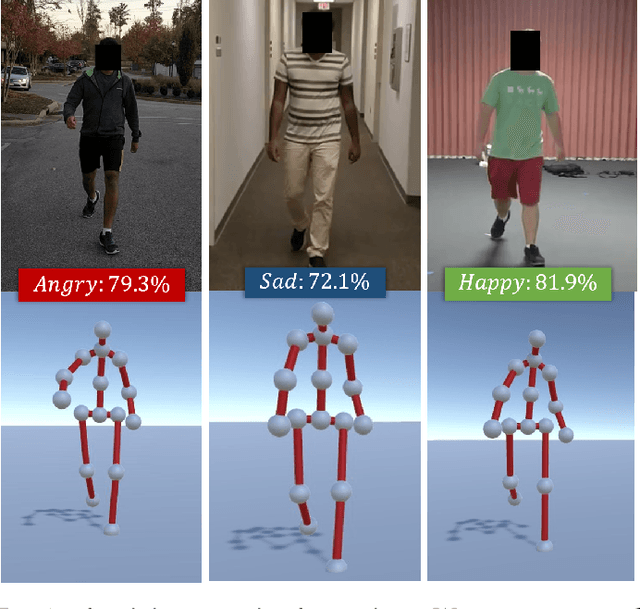
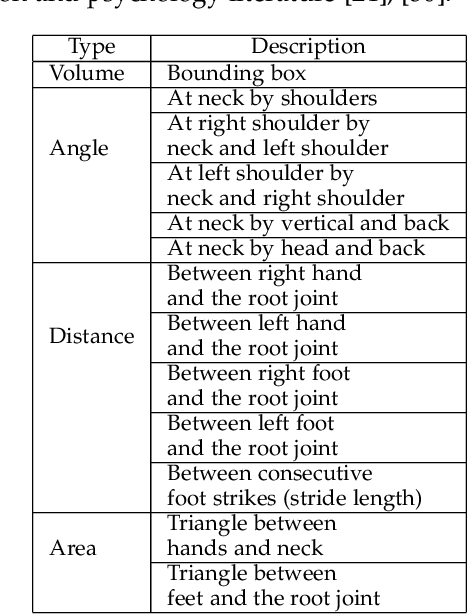
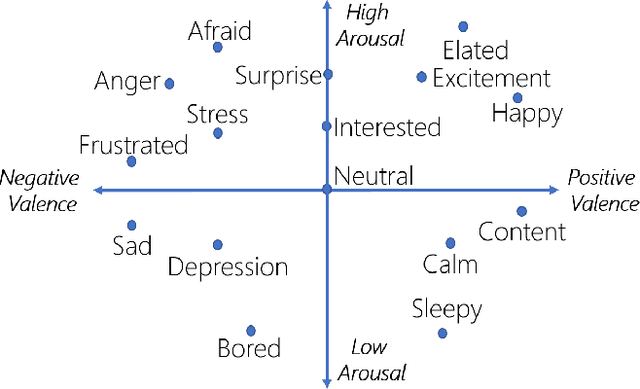
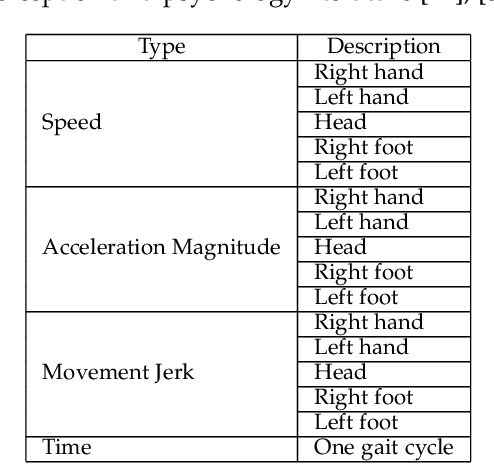
We present a new data-driven model and algorithm to identify the perceived emotions of individuals based on their walking styles. Given an RGB video of an individual walking, we extract his/her walking gait in the form of a series of 3D poses. Our goal is to exploit the gait features to classify the emotional state of the human into one of four emotions: happy, sad, angry, or neutral. Our perceived emotion recognition approach uses deep features learned via LSTM on labeled emotion datasets. Furthermore, we combine these features with affective features computed from gaits using posture and movement cues. These features are classified using a Random Forest Classifier. We show that our mapping between the combined feature space and the perceived emotional state provides 80.07% accuracy in identifying the perceived emotions. In addition to classifying discrete categories of emotions, our algorithm also predicts the values of perceived valence and arousal from gaits. We also present an EWalk (Emotion Walk) dataset that consists of videos of walking individuals with gaits and labeled emotions. To the best of our knowledge, this is the first gait-based model to identify perceived emotions from videos of walking individuals.
RoadTrack: Realtime Tracking of Road Agents in Dense and Heterogeneous Environments
Jul 21, 2019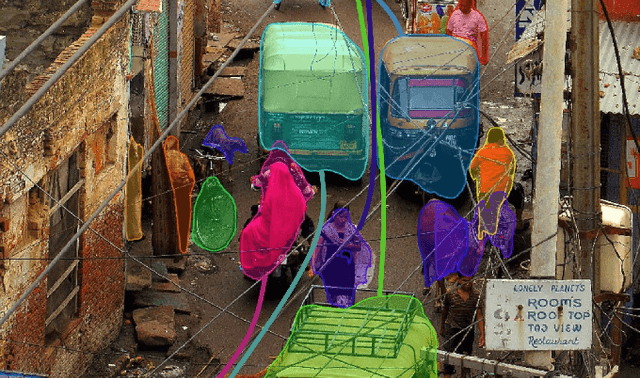
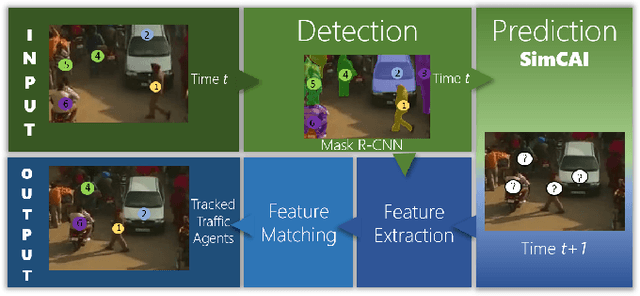

We present a realtime tracking algorithm, RoadTrack, to track heterogeneous road-agents in dense traffic videos. Our approach is designed for traffic scenarios that consist of different road-agents such as pedestrians, two-wheelers, cars, buses, etc. sharing the road. We use the tracking-by-detection approach where we track a road-agent by matching the appearance or bounding box region in the current frame with the predicted bounding box region propagated from the previous frame. RoadTrack uses a novel motion model called the Simultaneous Collision Avoidance and Interaction (SimCAI) model to predict the motion of road-agents by modeling collision avoidance and interactions between the road-agents for the next frame. We demonstrate the advantage of RoadTrack on a dataset of dense traffic videos and observe an accuracy of 75.8% on this dataset, outperforming prior state-of-the-art tracking algorithms by at least 5.2%. RoadTrack operates in realtime at approximately 30 fps and is at least 4 times faster than prior tracking algorithms on standard tracking datasets.
FVA: Modeling Perceived Friendliness of Virtual Agents Using Movement Characteristics
Jun 30, 2019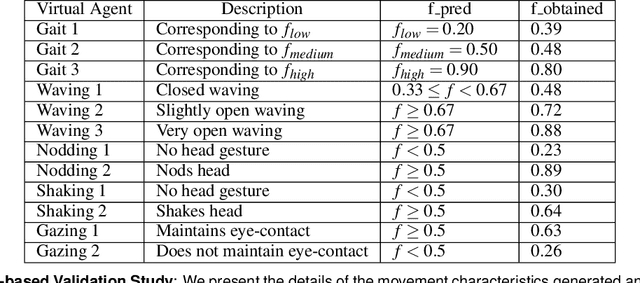
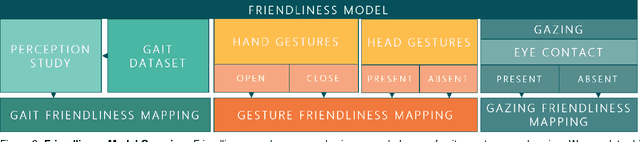
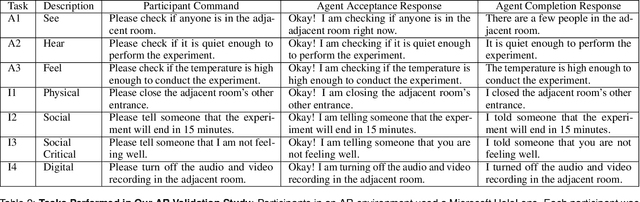
We present a new approach for improving the friendliness and warmth of a virtual agent in an AR environment by generating appropriate movement characteristics. Our algorithm is based on a novel data-driven friendliness model that is computed using a user-study and psychological characteristics. We use our model to control the movements corresponding to the gaits, gestures, and gazing of friendly virtual agents (FVAs) as they interact with the user's avatar and other agents in the environment. We have integrated FVA agents with an AR environment using with a Microsoft HoloLens. Our algorithm can generate plausible movements at interactive rates to increase the social presence. We also investigate the perception of a user in an AR setting and observe that an FVA has a statistically significant improvement in terms of the perceived friendliness and social presence of a user compared to an agent without the friendliness modeling. We observe an increment of 5.71% in the mean responses to a friendliness measure and an improvement of 4.03% in the mean responses to a social presence measure.
The Emotionally Intelligent Robot: Improving Social Navigation in Crowded Environments
Mar 07, 2019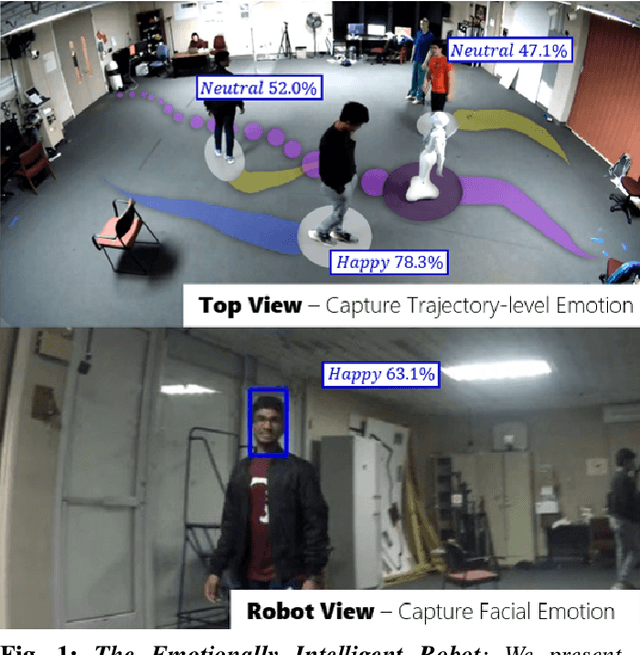
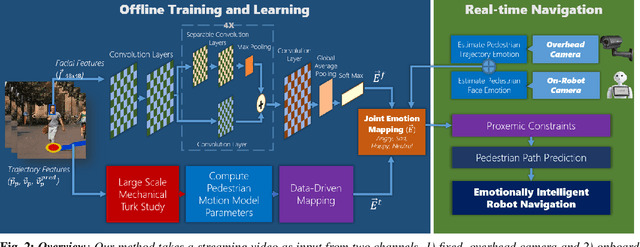
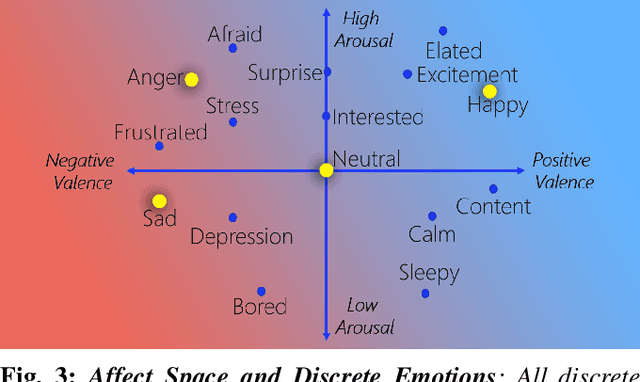
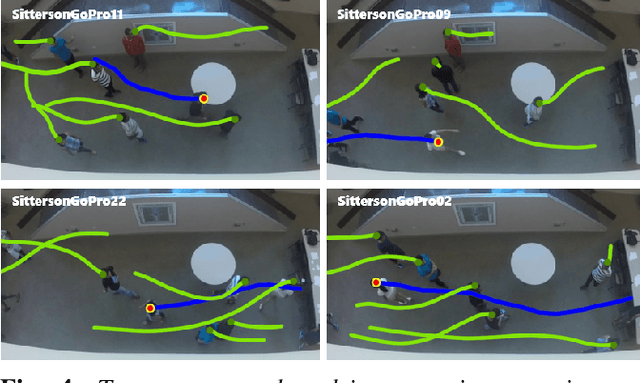
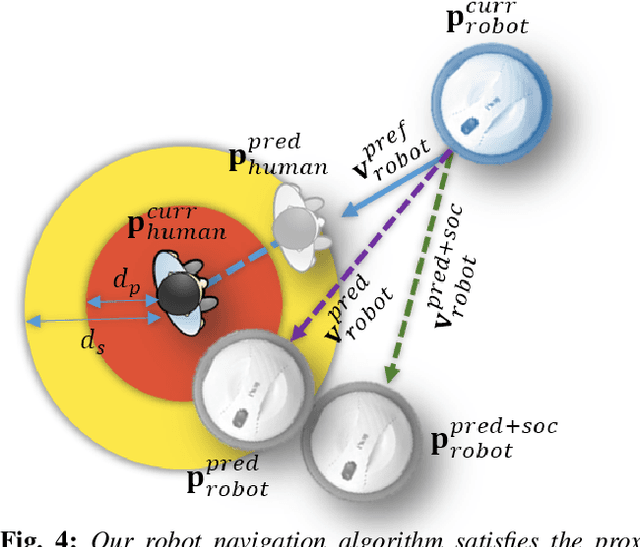
We present a real-time algorithm for emotion-aware navigation of a robot among pedestrians. Our approach estimates time-varying emotional behaviors of pedestrians from their faces and trajectories using a combination of Bayesian-inference, CNN-based learning, and the PAD (Pleasure-Arousal-Dominance) model from psychology. These PAD characteristics are used for long-term path prediction and generating proxemic constraints for each pedestrian. We use a multi-channel model to classify pedestrian characteristics into four emotion categories (happy, sad, angry, neutral). In our validation results, we observe an emotion detection accuracy of 85.33%. We formulate emotion-based proxemic constraints to perform socially-aware robot navigation in low- to medium-density environments. We demonstrate the benefits of our algorithm in simulated environments with tens of pedestrians as well as in a real-world setting with Pepper, a social humanoid robot.
Pedestrian Dominance Modeling for Socially-Aware Robot Navigation
Feb 13, 2019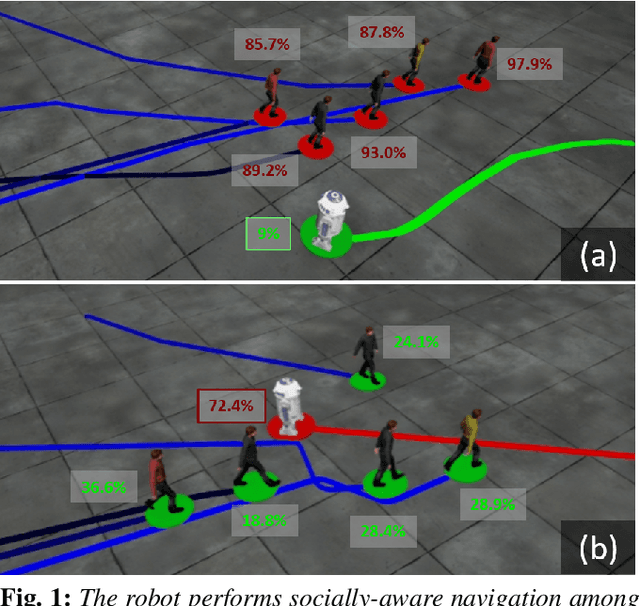
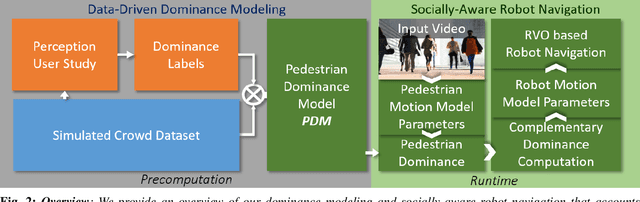
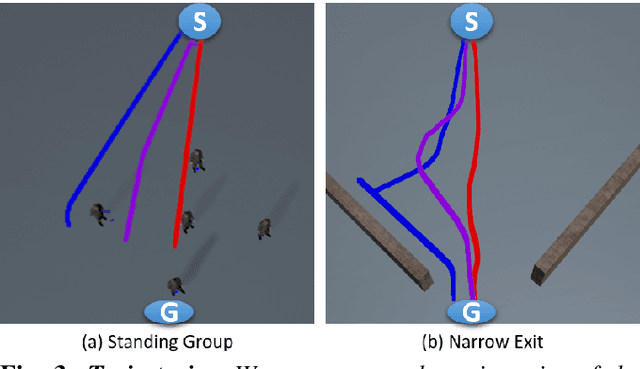
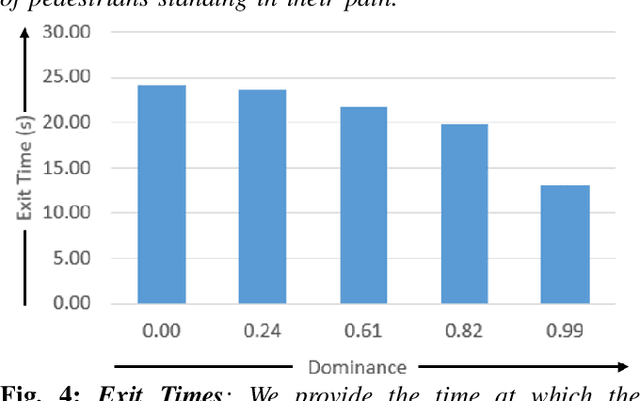
We present a Pedestrian Dominance Model (PDM) to identify the dominance characteristics of pedestrians for robot navigation. Through a perception study on a simulated dataset of pedestrians, PDM models the perceived dominance levels of pedestrians with varying motion behaviors corresponding to trajectory, speed, and personal space. At runtime, we use PDM to identify the dominance levels of pedestrians to facilitate socially-aware navigation for the robots. PDM can predict dominance levels from trajectories with ~85% accuracy. Prior studies in psychology literature indicate that when interacting with humans, people are more comfortable around people that exhibit complementary movement behaviors. Our algorithm leverages this by enabling the robots to exhibit complementing responses to pedestrian dominance. We also present an application of PDM for generating dominance-based collision-avoidance behaviors in the navigation of autonomous vehicles among pedestrians. We demonstrate the benefits of our algorithm for robots navigating among tens of pedestrians in simulated environments.
The Socially Invisible Robot: Navigation in the Social World using Robot Entitativity
Jul 18, 2018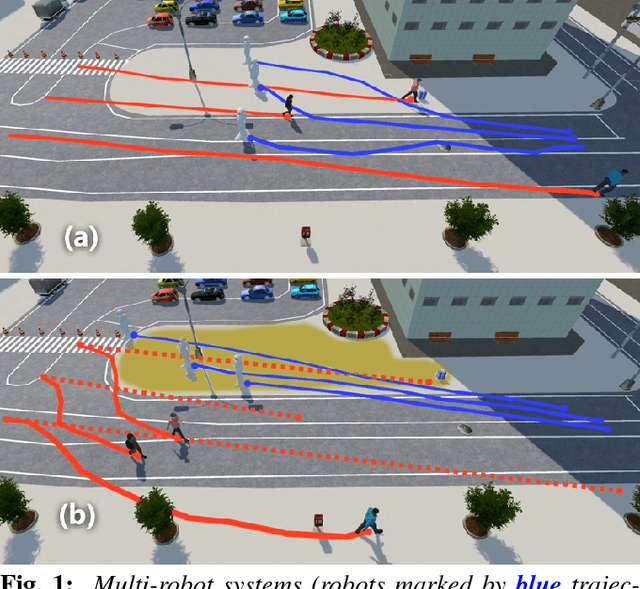


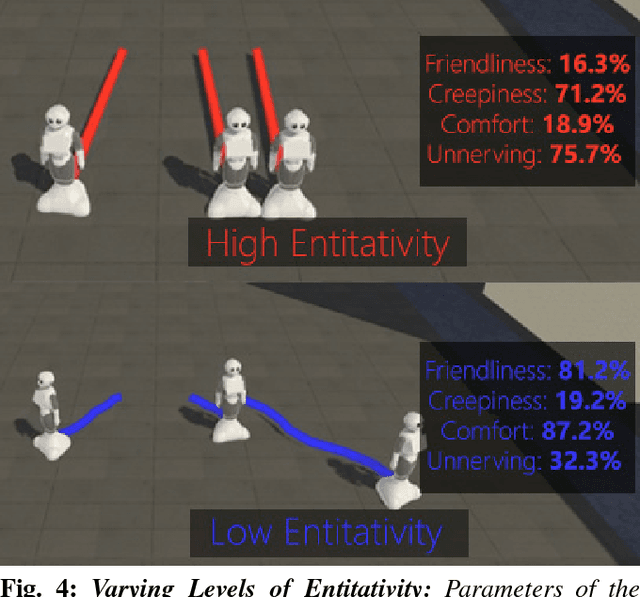
We present a real-time, data-driven algorithm to enhance the social-invisibility of robots within crowds. Our approach is based on prior psychological research, which reveals that people notice and--importantly--react negatively to groups of social actors when they have high entitativity, moving in a tight group with similar appearances and trajectories. In order to evaluate that behavior, we performed a user study to develop navigational algorithms that minimize entitativity. This study establishes a mapping between emotional reactions and multi-robot trajectories and appearances and further generalizes the finding across various environmental conditions. We demonstrate the applicability of our entitativity modeling for trajectory computation for active surveillance and dynamic intervention in simulated robot-human interaction scenarios. Our approach empirically shows that various levels of entitative robots can be used to both avoid and influence pedestrians while not eliciting strong emotional reactions, giving multi-robot systems socially-invisibility.
SocioSense: Robot Navigation Amongst Pedestrians with Social and Psychological Constraints
Jun 04, 2017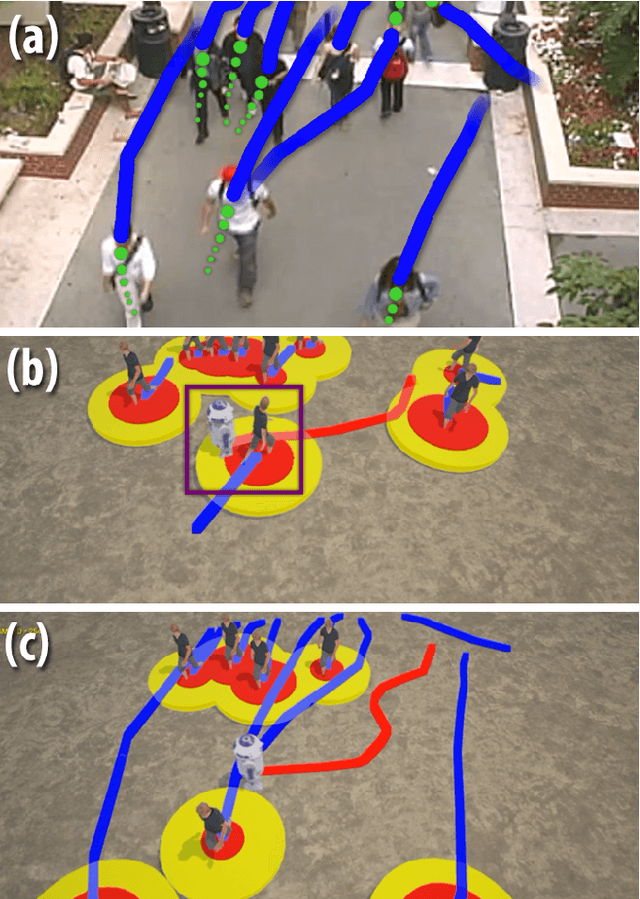
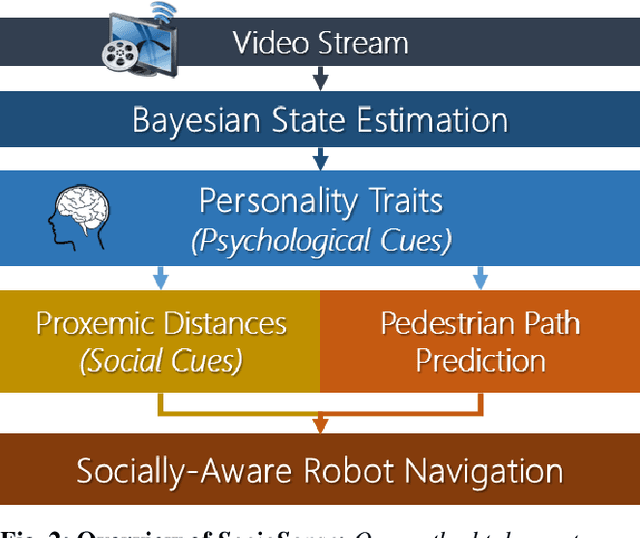
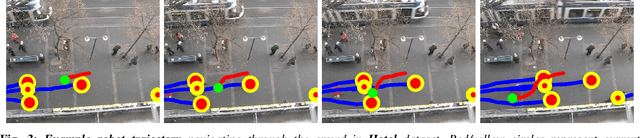
We present a real-time algorithm, SocioSense, for socially-aware navigation of a robot amongst pedestrians. Our approach computes time-varying behaviors of each pedestrian using Bayesian learning and Personality Trait theory. These psychological characteristics are used for long-term path prediction and generating proximic characteristics for each pedestrian. We combine these psychological constraints with social constraints to perform human-aware robot navigation in low- to medium-density crowds. The estimation of time-varying behaviors and pedestrian personalities can improve the performance of long-term path prediction by 21%, as compared to prior interactive path prediction algorithms. We also demonstrate the benefits of our socially-aware navigation in simulated environments with tens of pedestrians.