 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Emotionally Intelligent Robot: Improving Social Navigation in Crowded Environments
Mar 07, 2019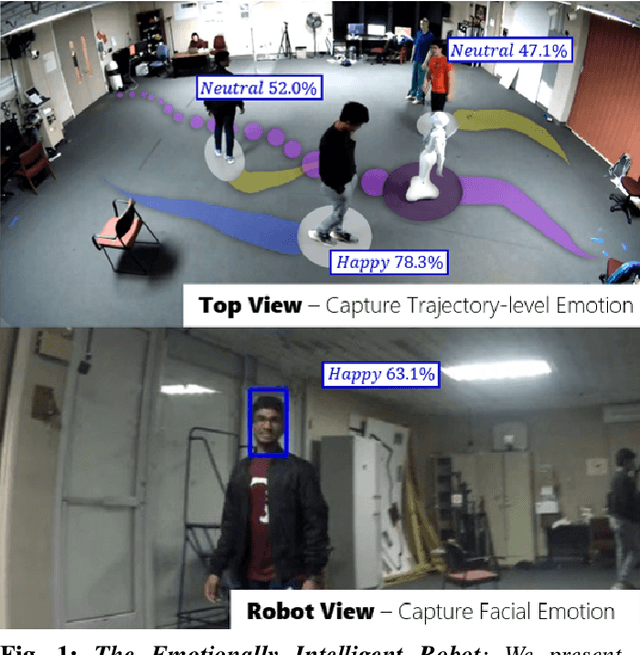
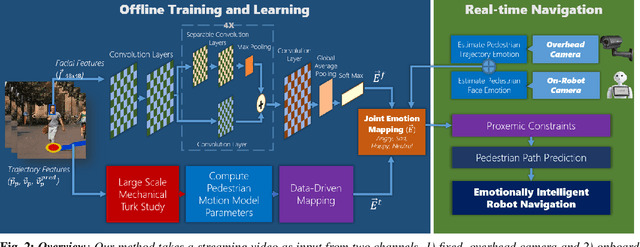
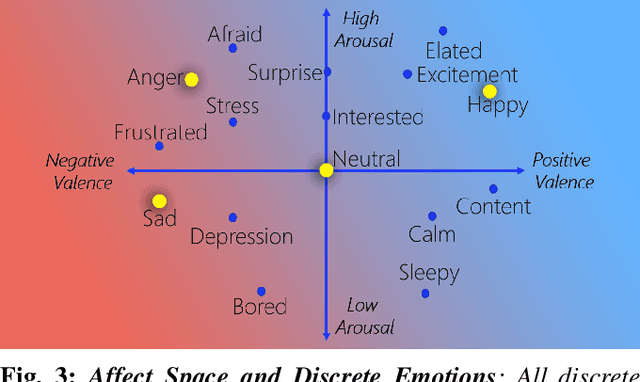
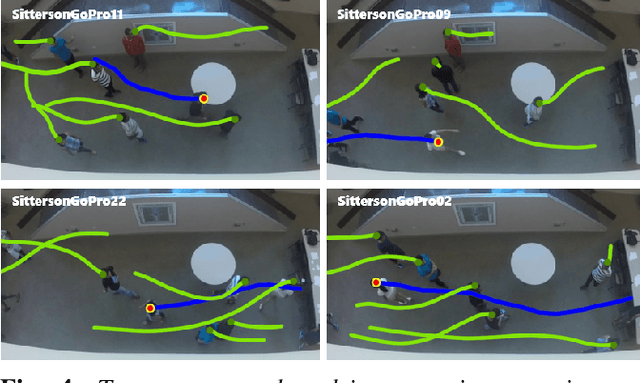
We present a real-time algorithm for emotion-aware navigation of a robot among pedestrians. Our approach estimates time-varying emotional behaviors of pedestrians from their faces and trajectories using a combination of Bayesian-inference, CNN-based learning, and the PAD (Pleasure-Arousal-Dominance) model from psychology. These PAD characteristics are used for long-term path prediction and generating proxemic constraints for each pedestrian. We use a multi-channel model to classify pedestrian characteristics into four emotion categories (happy, sad, angry, neutral). In our validation results, we observe an emotion detection accuracy of 85.33%. We formulate emotion-based proxemic constraints to perform socially-aware robot navigation in low- to medium-density environments. We demonstrate the benefits of our algorithm in simulated environments with tens of pedestrians as well as in a real-world setting with Pepper, a social humanoid robot.
SocioSense: Robot Navigation Amongst Pedestrians with Social and Psychological Constraints
Jun 04, 2017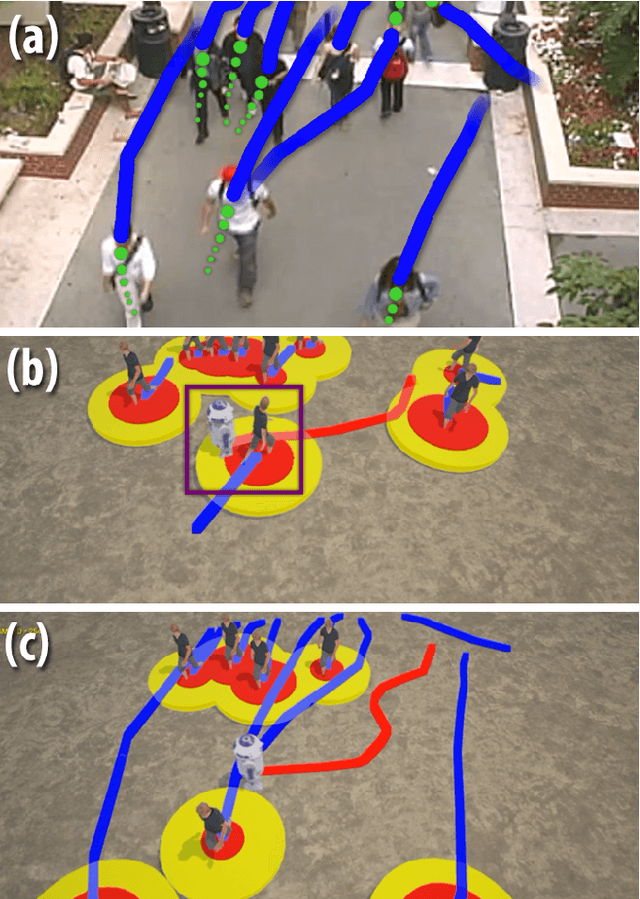
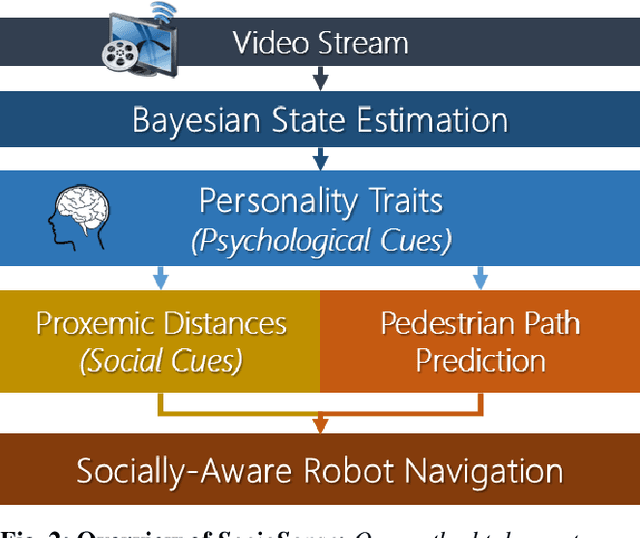
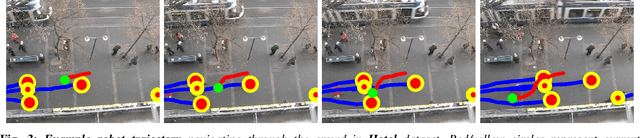
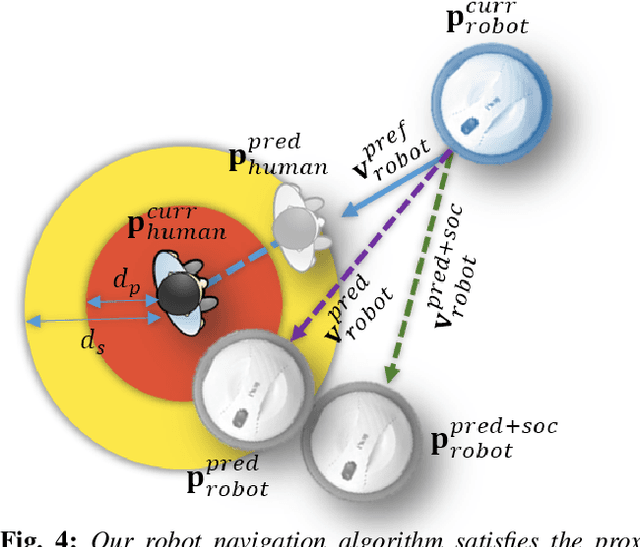
We present a real-time algorithm, SocioSense, for socially-aware navigation of a robot amongst pedestrians. Our approach computes time-varying behaviors of each pedestrian using Bayesian learning and Personality Trait theory. These psychological characteristics are used for long-term path prediction and generating proximic characteristics for each pedestrian. We combine these psychological constraints with social constraints to perform human-aware robot navigation in low- to medium-density crowds. The estimation of time-varying behaviors and pedestrian personalities can improve the performance of long-term path prediction by 21%, as compared to prior interactive path prediction algorithms. We also demonstrate the benefits of our socially-aware navigation in simulated environments with tens of pedestrians.