 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Socially Invisible Robot: Navigation in the Social World using Robot Entitativity
Paper and Code
Jul 18, 2018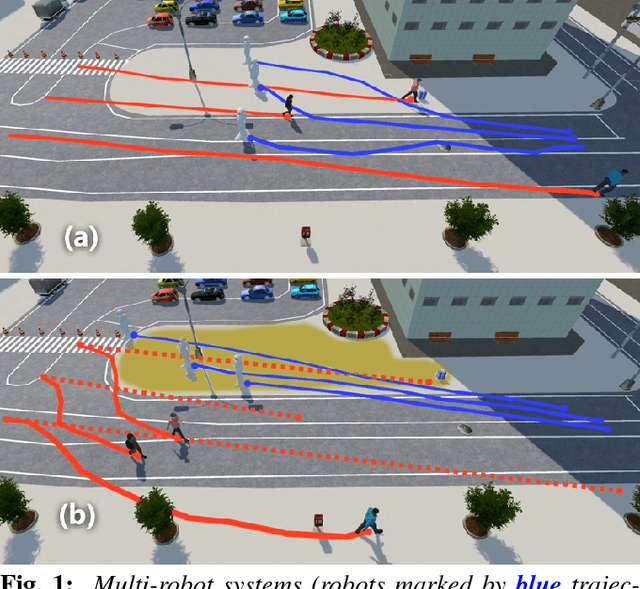


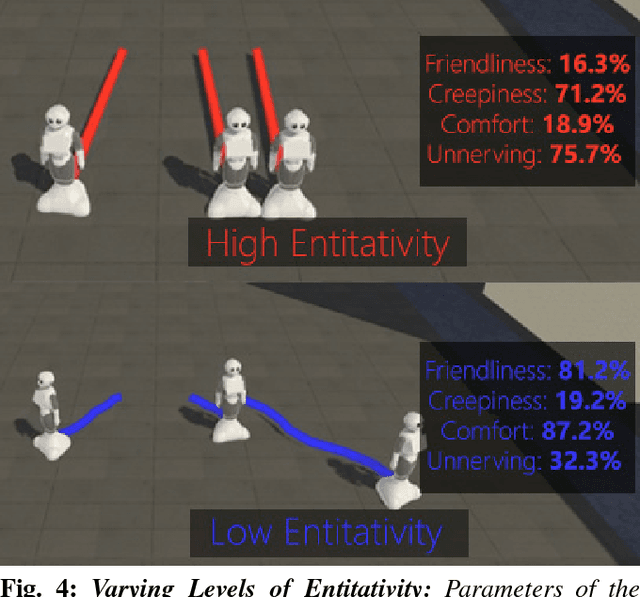
We present a real-time, data-driven algorithm to enhance the social-invisibility of robots within crowds. Our approach is based on prior psychological research, which reveals that people notice and--importantly--react negatively to groups of social actors when they have high entitativity, moving in a tight group with similar appearances and trajectories. In order to evaluate that behavior, we performed a user study to develop navigational algorithms that minimize entitativity. This study establishes a mapping between emotional reactions and multi-robot trajectories and appearances and further generalizes the finding across various environmental conditions. We demonstrate the applicability of our entitativity modeling for trajectory computation for active surveillance and dynamic intervention in simulated robot-human interaction scenarios. Our approach empirically shows that various levels of entitative robots can be used to both avoid and influence pedestrians while not eliciting strong emotional reactions, giving multi-robot systems socially-invisibility.