 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Robot of Theseus: A modular robotic testbed for legged locomotion
May 19, 2025Robotic models are useful for independently varying specific features, but most quadrupedal robots differ so greatly from animal morphologies that they have minimal biomechanical relevance. Commercially available quadrupedal robots are also prohibitively expensive for biological research programs and difficult to customize. Here, we present a low-cost quadrupedal robot with modular legs that can match a wide range of animal morphologies for biomechanical hypothesis testing. The Robot Of Theseus (TROT) costs approximately $4000 to build out of 3D printed parts and standard off-the-shelf supplies. Each limb consists of 2 or 3 rigid links; the proximal joint can be rotated to become a knee or elbow. Telescoping mechanisms vary the length of each limb link. The open-source software accommodates user-defined gaits and morphology changes. Effective leg length, or crouch, is determined by the four-bar linkage actuating each joint. The backdrivable motors can vary virtual spring stiffness and range of motion. Full descriptions of the TROT hardware and software are freely available online. We demonstrate the use of TROT to compare locomotion among extant, extinct, and theoretical morphologies. In addition to biomechanical hypothesis testing, we envision a variety of different applications for this low-cost, modular, legged robotic platform, including developing novel control strategies, clearing land mines, or remote exploration. All CAD and code is available for download on the TROT project page.
TALE-teller: Tendon-Actuated Linked Element Robotic Testbed for Investigating Tail Functions
Oct 28, 2024Tails serve various functions in both robotics and biology, including expression, grasping, and defense. The vertebrate tails associated with these functions exhibit diverse patterns of vertebral lengths, but the precise mechanisms linking form to function have not yet been established. Vertebrate tails are complex musculoskeletal structures, making both direct experimentation and computational modeling challenging. This paper presents Tendon-Actuated Linked-Element (TALE), a modular robotic test bed to explore how tail morphology influences function. By varying 3D printed bones, silicone joints, and tendon configurations, TALE can match the morphology of extant, extinct, and even theoretical tails. We first characterized the stiffness of our joint design empirically and in simulation before testing the hypothesis that tails with different vertebral proportions curve differently. We then compared the maximum bending state of two common vertebrate proportions and one theoretical morphology. Uniform bending of joints with different vertebral proportions led to substantial differences in the location of the tail tip, suggesting a significant influence on overall tail function. Future studies can introduce more complex morphologies to establish the mechanisms of diverse tail functions. With this foundational knowledge, we will isolate the key features underlying tail function to inform the design for robotic tails. Images and videos can be found on TALE's project page: https://www.embirlab.com/tale.
Jointed Tails Enhance Control of Three-dimensional Body Rotation
Jun 14, 2024



Tails used as inertial appendages induce body rotations of animals and robots, a phenomenon that is governed largely by the ratio of the body and tail moments of inertia. However, vertebrate tails have more degrees of freedom (e.g., number of joints, rotational axes) than most current theoretical models and robotic tails. To understand how morphology affects inertial appendage function, we developed an optimization-based approach that finds the maximally effective tail trajectory and measures error from a target trajectory. For tails of equal total length and mass, increasing the number of equal-length joints increased the complexity of maximally effective tail motions. When we optimized the relative lengths of tail bones while keeping the total tail length, mass, and number of joints the same, this optimization-based approach found that the lengths match the pattern found in the tail bones of mammals specialized for inertial maneuvering. In both experiments, adding joints enhanced the performance of the inertial appendage, but with diminishing returns, largely due to the total control effort constraint. This optimization-based simulation can compare the maximum performance of diverse inertial appendages that dynamically vary in moment of inertia in 3D space, predict inertial capabilities from skeletal data, and inform the design of robotic inertial appendages.
Humans prefer interacting with slow, less realistic butterfly simulations
Apr 25, 2024How should zoomorphic, or bio-inspired, robots indicate to humans that interactions will be safe and fun? Here, a survey is used to measure how human willingness to interact with a simulated butterfly robot is affected by different flight patterns. Flapping frequency, flap to glide ratio, and flapping pattern were independently varied based on a literature review of butterfly and moth flight. Human willingness to interact with these simulations and demographic information were self-reported via an online survey. Low flapping frequency and greater proportion of gliding were preferred, and prior experience with butterflies strongly predicted greater interaction willingness. The preferred flight parameters correspond to migrating butterfly flight patterns that are rarely directly observed by humans and do not correspond to the species that inspired the wing shape of the robot model. The most realistic butterfly simulations were among the least preferred. An analysis of animated butterflies in popular media revealed a convergence on slower, less realistic flight parameters. This iterative and interactive artistic process provides a model for determining human preferences and identifying functional requirements of robots for human interaction. Thus, the robotic design process can be streamlined by leveraging animated models and surveys prior to construction.
SKOOTR: A SKating, Omni-Oriented, Tripedal Robot
Feb 06, 2024In both animals and robots, locomotion capabilities are determined by the physical structure of the system. The majority of legged animals and robots are bilaterally symmetric, which facilitates locomotion with consistent headings and obstacle traversal, but leads to constraints in their turning ability. On the other hand, radially symmetric animals have demonstrated rapid turning abilities enabled by their omni-directional body plans. Radially symmetric tripedal robots are able to turn instantaneously, but are commonly constrained by needing to change direction with every step, resulting in inefficient and less stable locomotion. We address these challenges by introducing a novel design for a tripedal robot that has both frictional and rolling contacts. Additionally, a freely rotating central sphere provides an added contact point so the robot can retain a stable tripod base of support while lifting and pushing with any one of its legs. The SKating, Omni-Oriented, Tripedal Robot (SKOOTR) is more versatile and stable than other existing tripedal robots. It is capable of multiple forward gaits, multiple turning maneuvers, obstacle traversal, and stair climbing. SKOOTR has been designed to facilitate customization for diverse applications: it is fully open-source, is constructed with 3D printed or off-the-shelf parts, and costs approximately $500 USD to build.
Design and Characterization of 3D Printed, Open-Source Actuators for Legged Locomotion
Feb 24, 2022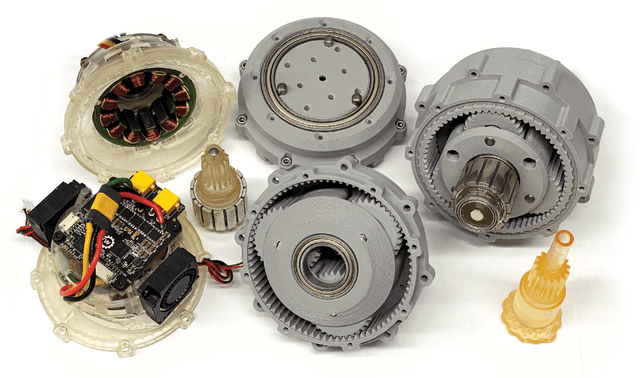

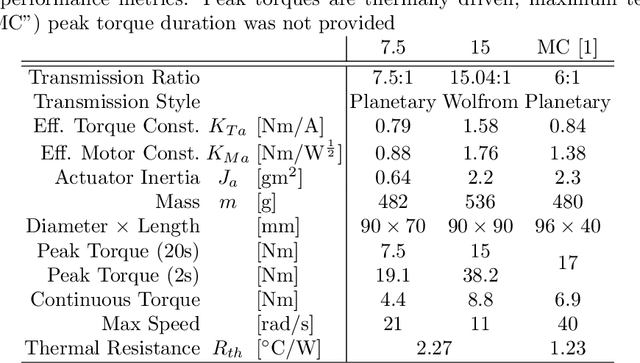
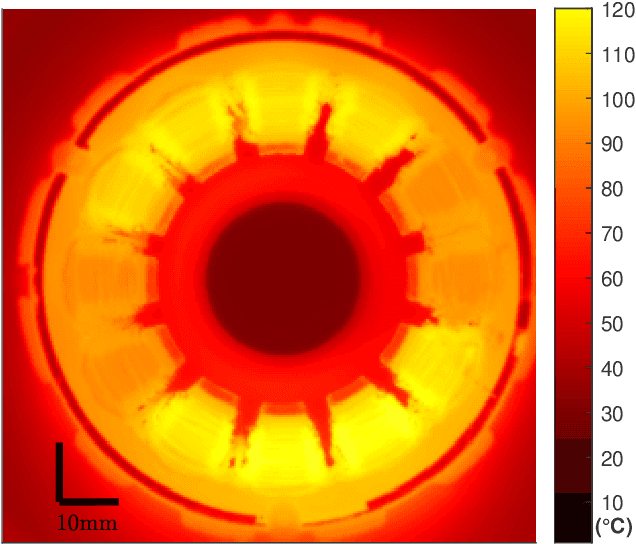
Impressive animal locomotion capabilities are mediated by the co-evolution of the skeletal morphology and muscular properties. Legged robot performance would also likely benefit from the co-optimization of actuators and leg morphology. However, development of custom actuators for legged robots is often expensive and time consuming, which discourages roboticists from pursuing performance gains afforded by application-specific actuator optimization. This paper presents open-source designs for two quasi-direct-drive actuators with performance regimes appropriate for an 8--15 kg robot, built completely with off the shelf and 3D-printed components for less than $200 USD each. The mechanical, electrical, and thermal properties of each actuator are characterized and compared to benchmark data. Actuators subjected to 420k strides of gait data experienced only a 2% reduction in efficiency and 26 mrad in backlash growth, demonstrating viability for rigorous and sustained research applications. We present a thermal solution that nearly doubles the thermally-driven torque limits of our plastic actuator design. The performance results are comparable to traditional metallic actuators for use in high-speed legged robots of the same scale. These 3D printed designs demonstrate an approach for designing and characterizing low-cost, highly customizable, and highly reproducible actuators, democratizing the field of actuator design and enabling co-design and optimization of actuators and robot legs.
Alternative Metrics to Select Motors for Quasi-Direct Drive Actuators
Feb 24, 2022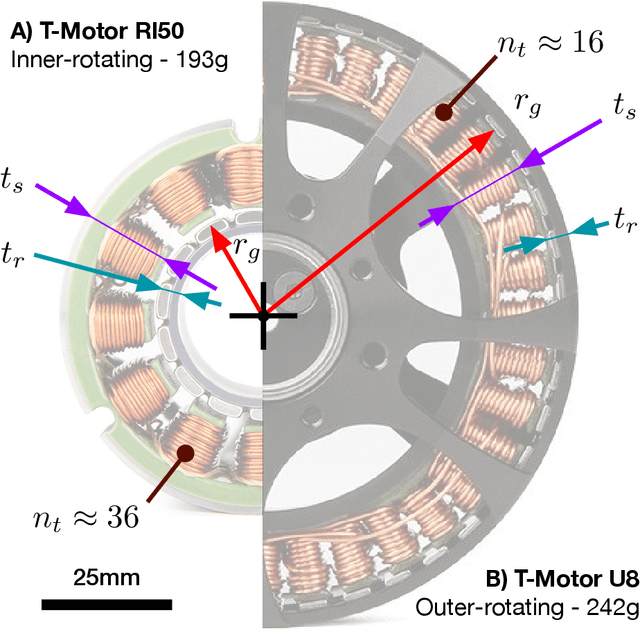
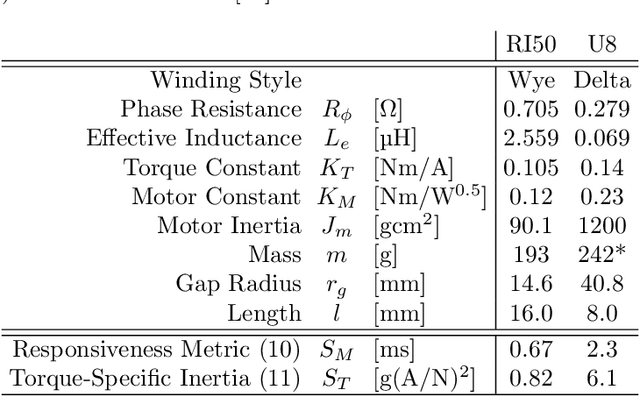

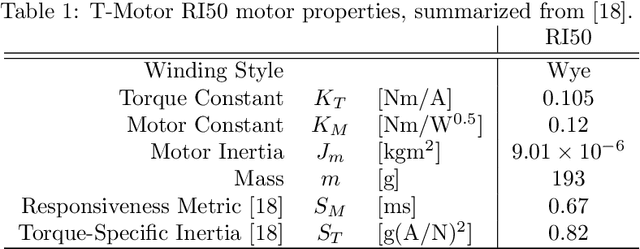
Robotic systems for legged locomotion -- including legged robots, exoskeletons, and prosthetics -- require actuators with low inertia and high output torque. Traditionally, motors have been selected for these applications by maximizing the motor gap radius. We present alternative metrics for motor selection that are invariant to transmission ratio. The proposed metrics reward minimizing the motor inertia while maximizing the torque and motor constants without special consideration for gap radius, providing a better balance of properties for legged locomotion applications. We rigorously characterize the T-Motor RI50 and demonstrate the use of the metrics by comparing the RI50 to the widely-used T-Motor U8 as a case study.
Emulating duration and curvature of coral snake anti-predator thrashing behaviors using a soft-robotic platform
Feb 21, 2020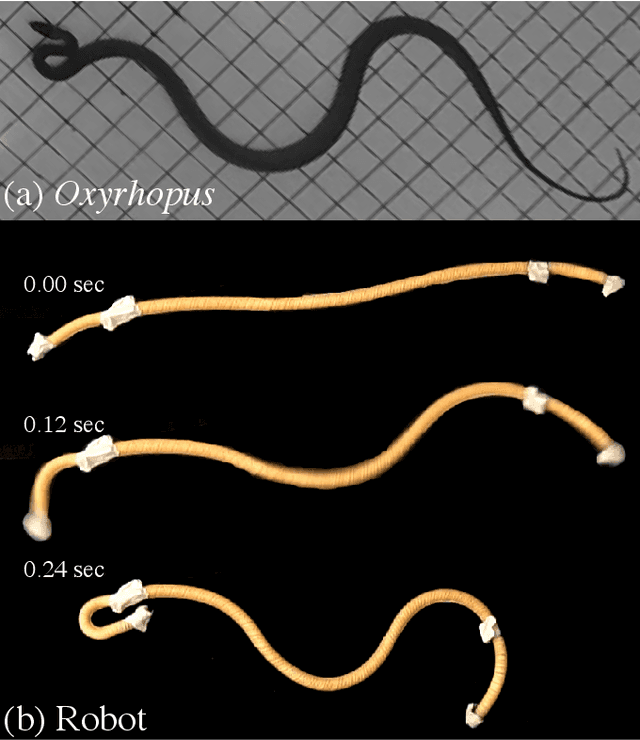
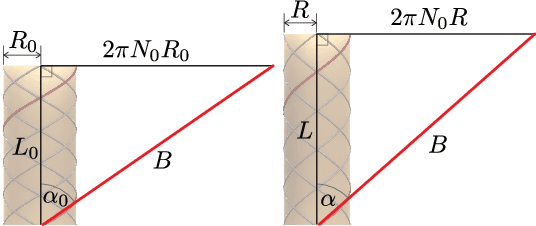
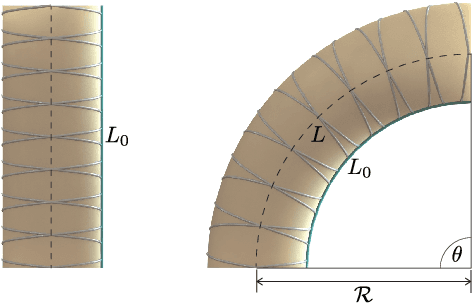
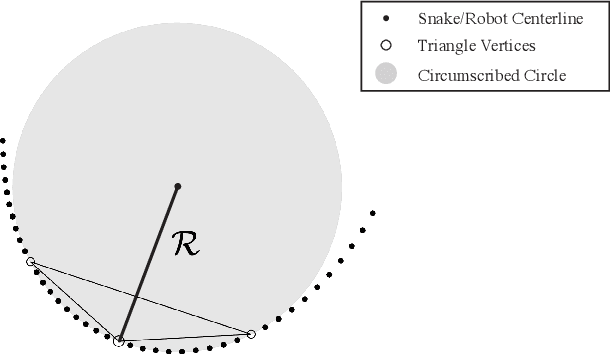
This paper presents a soft-robotic platform for exploring the ecological relevance of non-locomotory movements via animal-robot interactions. Coral snakes (genus Micrurus) and their mimics use vigorous, non-locomotory, and arrhythmic thrashing to deter predation. There is variation across snake species in the duration and curvature of anti-predator thrashes, and it is unclear how these aspects of motion interact to contribute to snake survival. In this work, soft robots composed of fiber-reinforced elastomeric enclosures (FREEs) are developed to emulate the anti-predator behaviors of three genera of snake. Curvature and duration of motion are estimated for both live snakes and robots, providing a quantitative assessment of the robots' ability to emulate snake poses. The curvature values of the fabricated soft-robotic head, midsection, and tail segments are found to overlap with those exhibited by live snakes. Soft robot motion durations were less than or equal to those of snakes for all three genera. Additionally, combinations of segments were selected to emulate three specific snake genera with distinct anti-predatory behavior, producing curvature values that aligned well with live snake observations.