 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStealthy Coverage Control for Human-enabled Real-Time 3D Reconstruction
Jan 31, 2026In this paper, we propose a novel semi-autonomous image sampling strategy, called stealthy coverage control, for human-enabled 3D structure reconstruction. The present mission involves a fundamental problem: while the number of images required to accurately reconstruct a 3D model depends on the structural complexity of the target scene to be reconstructed, it is not realistic to assume prior knowledge of the spatially non-uniform structural complexity. We approach this issue by leveraging human flexible reasoning and situational recognition capabilities. Specifically, we design a semi-autonomous system that leaves identification of regions that need more images and navigation of the drones to such regions to a human operator. To this end, we first present a way to reflect the human intention in autonomous coverage control. Subsequently, in order to avoid operational conflicts between manual control and autonomous coverage control, we develop the stealthy coverage control that decouples the drone motion for efficient image sampling from navigation by the human. Simulation studies on a Unity/ROS2-based simulator demonstrate that the present semi-autonomous system outperforms the one without human interventions in the sense of the reconstructed model quality.
Distributed Shape Learning of Complex Objects Using Gaussian Kernel
Dec 14, 2024


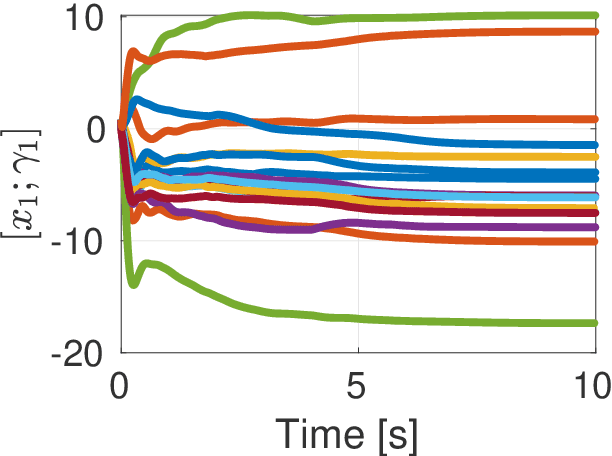
This paper addresses distributed learning of a complex object for multiple networked robots based on distributed optimization and kernel-based support vector machine. In order to overcome a fundamental limitation of polynomial kernels assumed in our antecessor, we employ Gaussian kernel as a kernel function for classification. The Gaussian kernel prohibits the robots to share the function through a finite number of equality constraints due to its infinite dimensionality of the function space. We thus reformulate the optimization problem assuming that the target function space is identified with the space spanned by the bases associated with not the data but a finite number of grid points. The above relaxation is shown to allow the robots to share the function by a finite number of equality constraints. We finally demonstrate the present approach through numerical simulations.
Angle-Aware Coverage with Camera Rotational Motion Control
Apr 22, 2024This paper presents a novel control strategy for drone networks to improve the quality of 3D structures reconstructed from aerial images by drones. Unlike the existing coverage control strategies for this purpose, our proposed approach simultaneously controls both the camera orientation and drone translational motion, enabling more comprehensive perspectives and enhancing the map's overall quality. Subsequently, we present a novel problem formulation, including a new performance function to evaluate the drone positions and camera orientations. We then design a QP-based controller with a control barrier-like function for a constraint on the decay rate of the objective function. The present problem formulation poses a new challenge, requiring significantly greater computational efforts than the case involving only translational motion control. We approach this issue technologically, namely by introducing JAX, utilizing just-in-time (JIT) compilation and Graphical Processing Unit (GPU) acceleration. We finally conduct extensive verifications through simulation in ROS (Robot Operating System) and show the real-time feasibility of the controller and the superiority of the present controller to the conventional method.
3D Map Reconstruction of an Orchard using an Angle-Aware Covering Control Strategy
Feb 06, 2022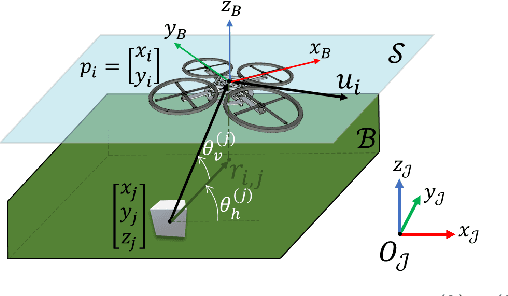
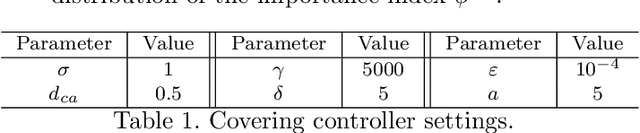
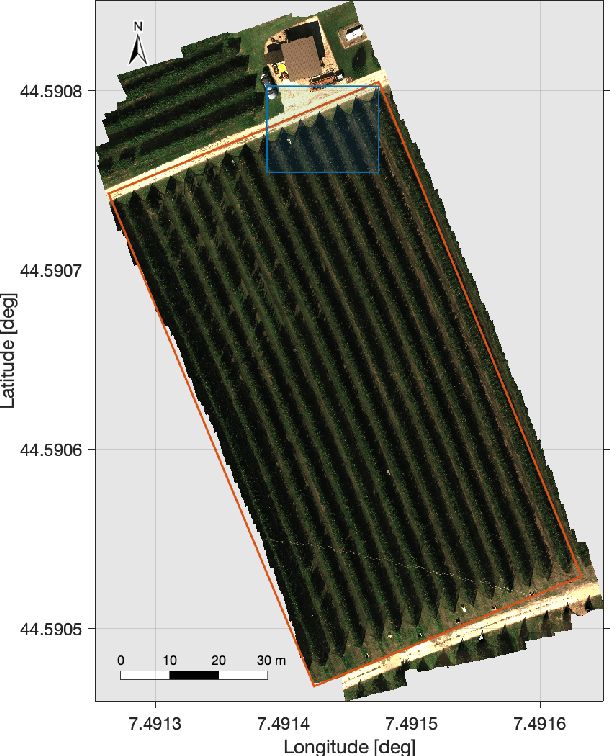
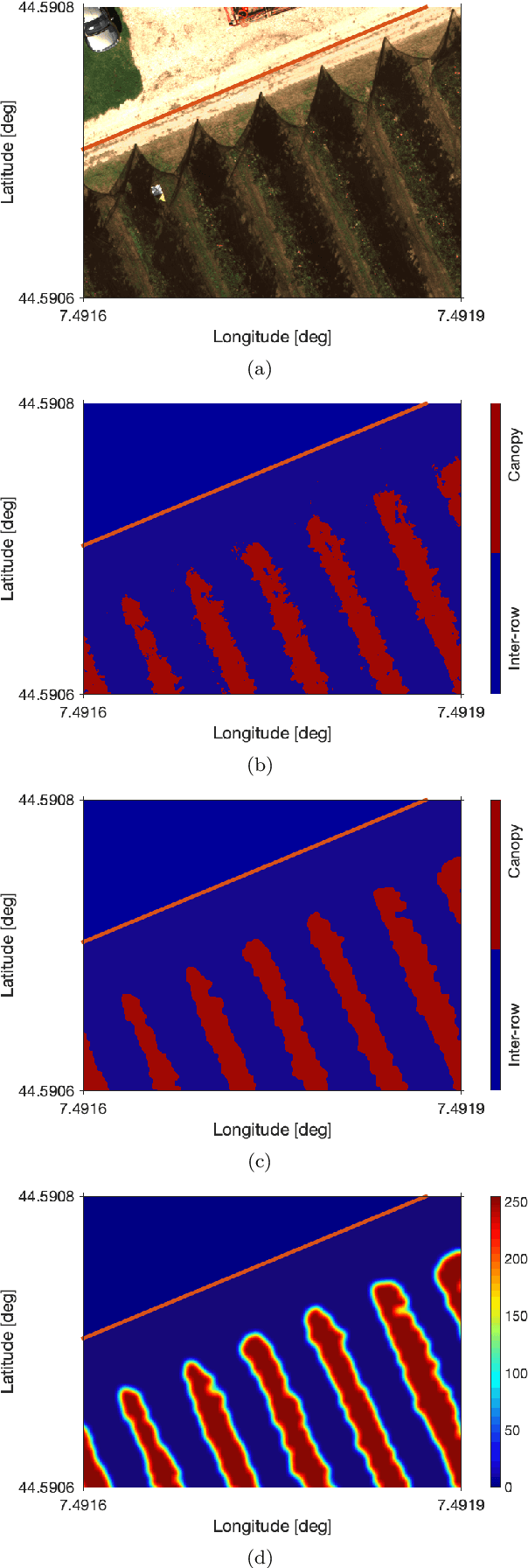
In the last years, unmanned aerial vehicles are becoming a reality in the context of precision agriculture, mainly for monitoring, patrolling and remote sensing tasks, but also for 3D map reconstruction. In this paper, we present an innovative approach where a fleet of unmanned aerial vehicles is exploited to perform remote sensing tasks over an apple orchard for reconstructing a 3D map of the field, formulating the covering control problem to combine the position of a monitoring target and the viewing angle. Moreover, the objective function of the controller is defined by an importance index, which has been computed from a multi-spectral map of the field, obtained by a preliminary flight, using a semantic interpretation scheme based on a convolutional neural network. This objective function is then updated according to the history of the past coverage states, thus allowing the drones to take situation-adaptive actions. The effectiveness of the proposed covering control strategy has been validated through simulations on a Robot Operating System.
A Passivity-Based Distributed Reference Governor for Constrained Robotic Networks
Mar 19, 2017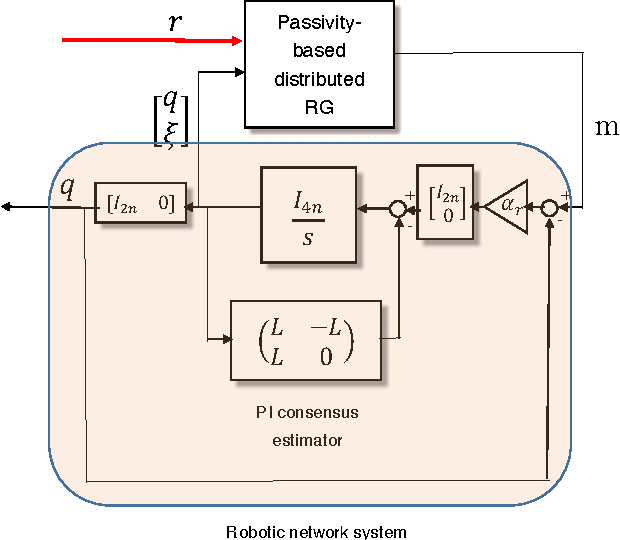
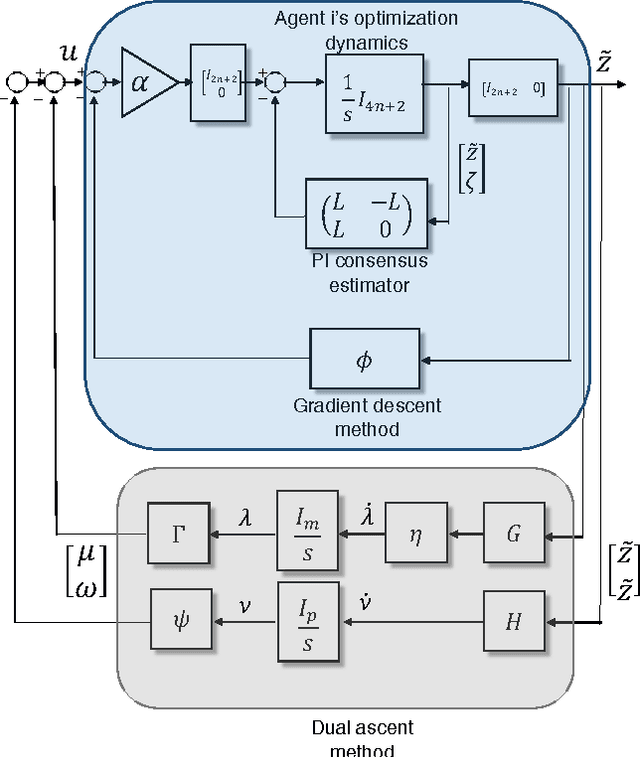
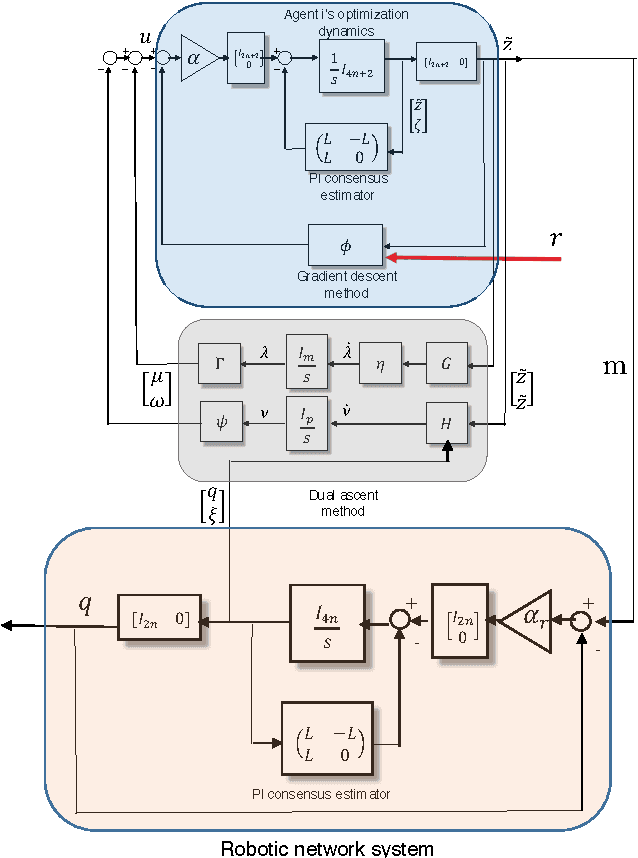
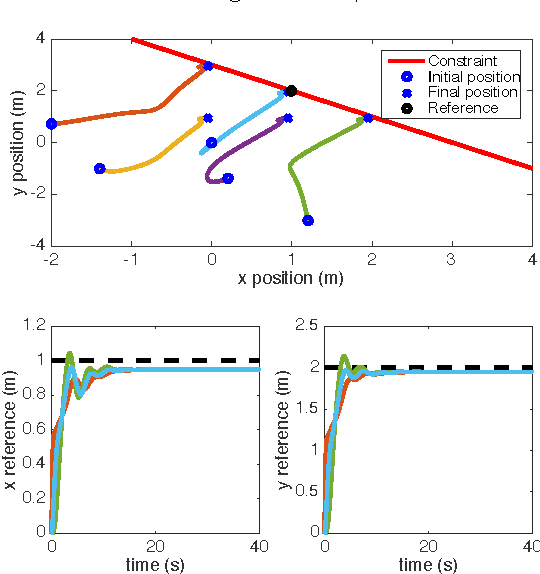
This paper focuses on a passivity-based distributed reference governor (RG) applied to a pre-stabilized mobile robotic network. The novelty of this paper lies in the method used to solve the RG problem, where a passivity-based distributed optimization scheme is proposed. In particular, the gradient descent method minimizes the global objective function while the dual ascent method maximizes the Hamiltonian. To make the agents converge to the agreed optimal solution, a proportional-integral consensus estimator is used. This paper proves the convergence of the state estimates of the RG to the optimal solution through passivity arguments, considering the physical system static. Then, the effectiveness of the scheme considering the dynamics of the physical system is demonstrated through simulations and experiments.