 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAMOT: Camera Angle-aware Multi-Object Tracking
Sep 26, 2024
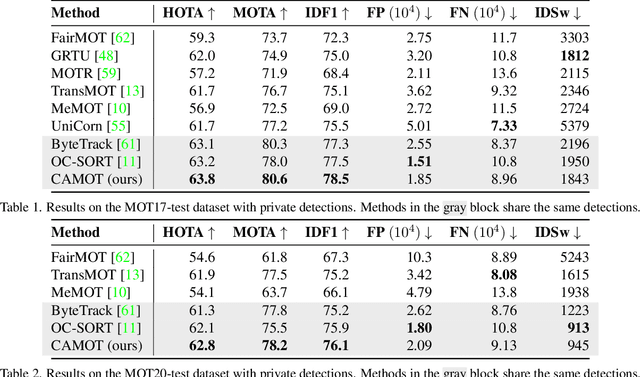


This paper proposes CAMOT, a simple camera angle estimator for multi-object tracking to tackle two problems: 1) occlusion and 2) inaccurate distance estimation in the depth direction. Under the assumption that multiple objects are located on a flat plane in each video frame, CAMOT estimates the camera angle using object detection. In addition, it gives the depth of each object, enabling pseudo-3D MOT. We evaluated its performance by adding it to various 2D MOT methods on the MOT17 and MOT20 datasets and confirmed its effectiveness. Applying CAMOT to ByteTrack, we obtained 63.8% HOTA, 80.6% MOTA, and 78.5% IDF1 in MOT17, which are state-of-the-art results. Its computational cost is significantly lower than the existing deep-learning-based depth estimators for tracking.
3D Map Reconstruction of an Orchard using an Angle-Aware Covering Control Strategy
Feb 06, 2022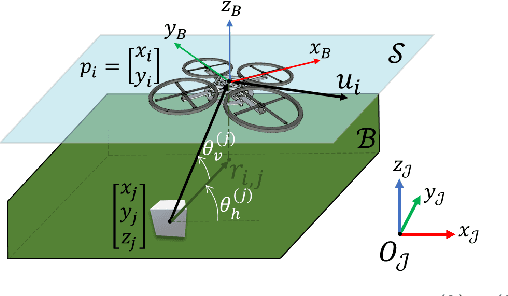
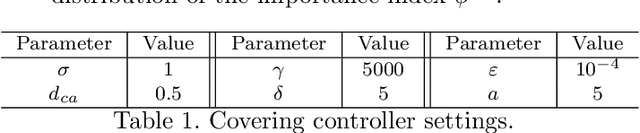
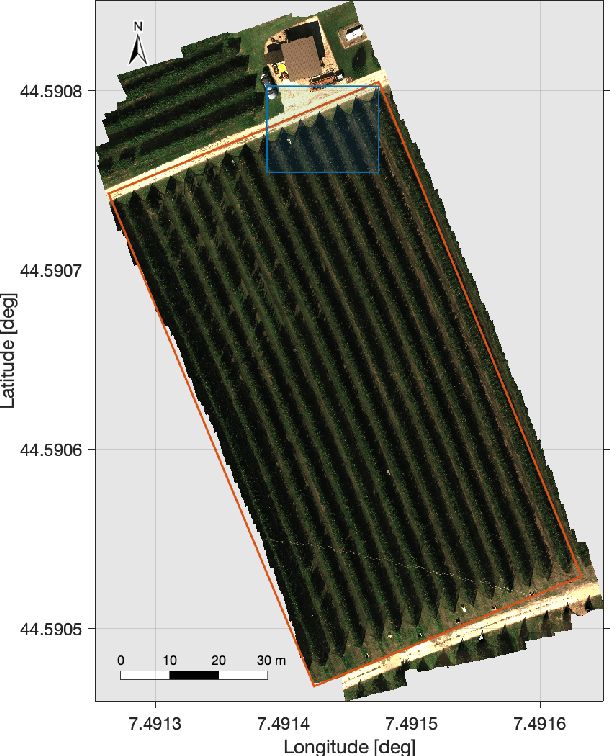
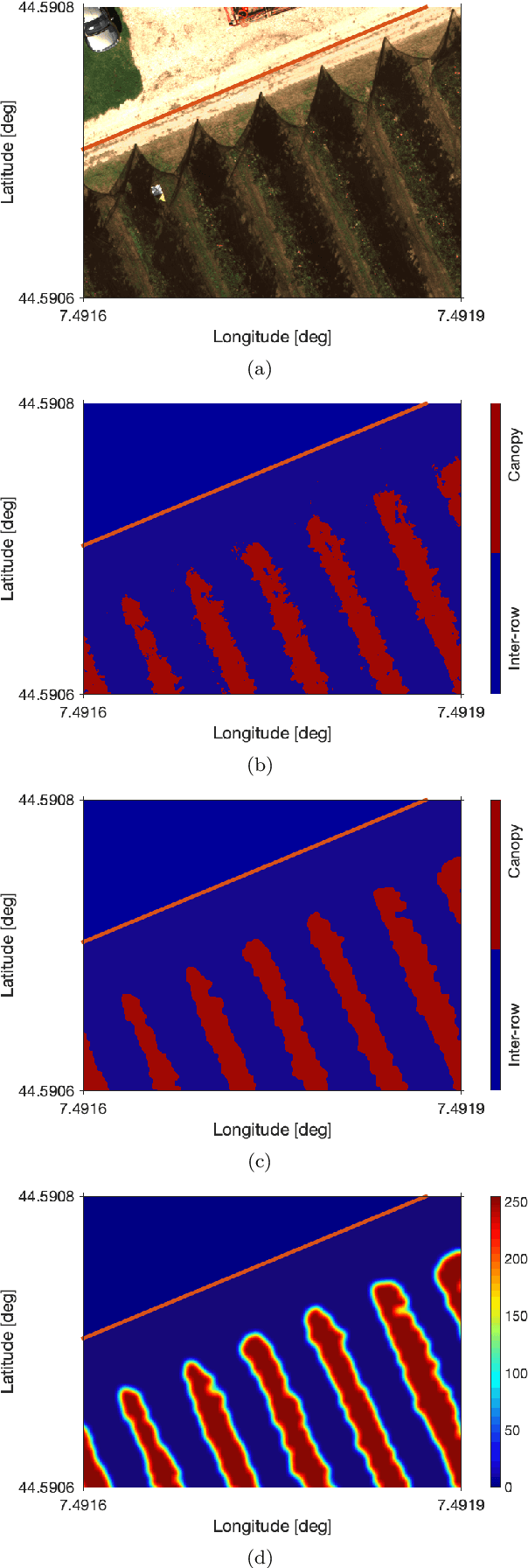
In the last years, unmanned aerial vehicles are becoming a reality in the context of precision agriculture, mainly for monitoring, patrolling and remote sensing tasks, but also for 3D map reconstruction. In this paper, we present an innovative approach where a fleet of unmanned aerial vehicles is exploited to perform remote sensing tasks over an apple orchard for reconstructing a 3D map of the field, formulating the covering control problem to combine the position of a monitoring target and the viewing angle. Moreover, the objective function of the controller is defined by an importance index, which has been computed from a multi-spectral map of the field, obtained by a preliminary flight, using a semantic interpretation scheme based on a convolutional neural network. This objective function is then updated according to the history of the past coverage states, thus allowing the drones to take situation-adaptive actions. The effectiveness of the proposed covering control strategy has been validated through simulations on a Robot Operating System.
Neural Architecture Search Using Stable Rank of Convolutional Layers
Sep 19, 2020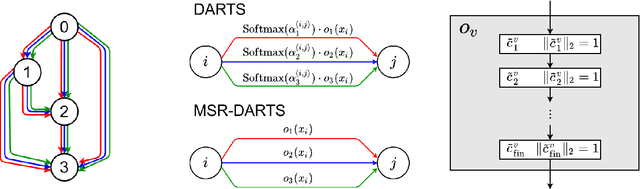
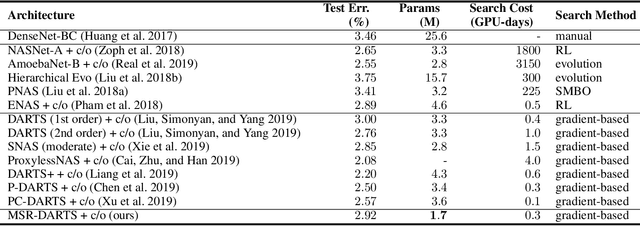
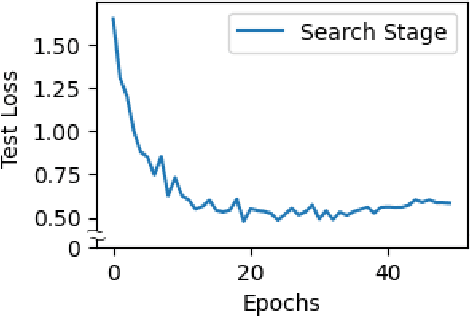
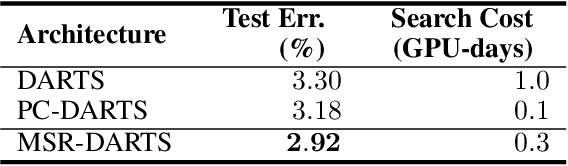
In Neural Architecture Search (NAS), Differentiable ARchiTecture Search (DARTS) has recently attracted much attention due to its high efficiency. It defines an over-parameterized network with mixed edges each of which represents all operator candidates, and jointly optimizes the weights of the network and its architecture in an alternating way. However, this process prefers a model whose weights converge faster than the others, and such a model with fastest convergence often leads to overfitting. Accordingly the resulting model cannot always be well-generalized. To overcome this problem, we propose Minimum Stable Rank DARTS (MSR-DARTS), which aims to find a model with the best generalization error by replacing the architecture optimization with the selection process using the minimum stable rank criterion. Specifically, a convolution operator is represented by a matrix and our method chooses the one whose stable rank is the smallest. We evaluate MSR-DARTS on CIFAR-10 and ImageNet dataset. It achieves an error rate of 2.92% with only 1.7M parameters within 0.5 GPU-days on CIFAR-10, and a top-1 error rate of 24.0% on ImageNet. Our MSR-DARTS directly optimizes an ImageNet model with only 2.6 GPU days while it is often impractical for existing NAS methods to directly optimize a large model such as ImageNet models and hence a proxy dataset such as CIFAR-10 is often utilized.