 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAMOT: Camera Angle-aware Multi-Object Tracking
Sep 26, 2024
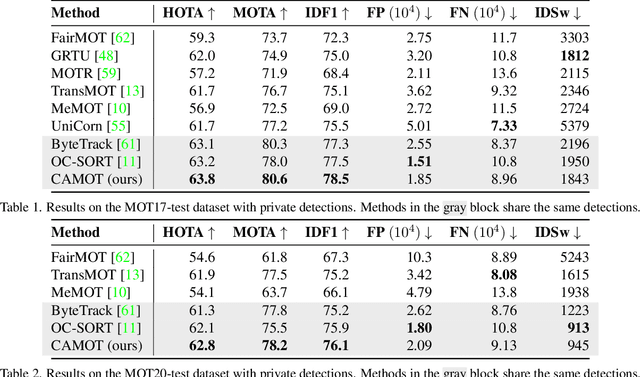


This paper proposes CAMOT, a simple camera angle estimator for multi-object tracking to tackle two problems: 1) occlusion and 2) inaccurate distance estimation in the depth direction. Under the assumption that multiple objects are located on a flat plane in each video frame, CAMOT estimates the camera angle using object detection. In addition, it gives the depth of each object, enabling pseudo-3D MOT. We evaluated its performance by adding it to various 2D MOT methods on the MOT17 and MOT20 datasets and confirmed its effectiveness. Applying CAMOT to ByteTrack, we obtained 63.8% HOTA, 80.6% MOTA, and 78.5% IDF1 in MOT17, which are state-of-the-art results. Its computational cost is significantly lower than the existing deep-learning-based depth estimators for tracking.