 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Concurrent Modular Agent: Framework for Autonomous LLM Agents
Aug 26, 2025We introduce the Concurrent Modular Agent (CMA), a framework that orchestrates multiple Large-Language-Model (LLM)-based modules that operate fully asynchronously yet maintain a coherent and fault-tolerant behavioral loop. This framework addresses long-standing difficulties in agent architectures by letting intention emerge from language-mediated interactions among autonomous processes. This approach enables flexible, adaptive, and context-dependent behavior through the combination of concurrently executed modules that offload reasoning to an LLM, inter-module communication, and a single shared global state.We consider this approach to be a practical realization of Minsky's Society of Mind theory. We demonstrate the viability of our system through two practical use-case studies. The emergent properties observed in our system suggest that complex cognitive phenomena like self-awareness may indeed arise from the organized interaction of simpler processes, supporting Minsky-Society of Mind concept and opening new avenues for artificial intelligence research. The source code for our work is available at: https://github.com/AlternativeMachine/concurrent-modular-agent.
The Glider Equation for Asymptotic Lenia
Aug 06, 2025Lenia is a continuous extension of Conway's Game of Life that exhibits rich pattern formations including self-propelling structures called gliders. In this paper, we focus on Asymptotic Lenia, a variant formulated as partial differential equations. By utilizing this mathematical formulation, we analytically derive the conditions for glider patterns, which we term the ``Glider Equation.'' We demonstrate that by using this equation as a loss function, gradient descent methods can successfully discover stable glider configurations. This approach enables the optimization of update rules to find novel gliders with specific properties, such as faster-moving variants. We also derive a velocity-free equation that characterizes gliders of any speed, expanding the search space for novel patterns. While many optimized patterns result in transient gliders that eventually destabilize, our approach effectively identifies diverse pattern formations that would be difficult to discover through traditional methods. Finally, we establish connections between Asymptotic Lenia and neural field models, highlighting mathematical relationships that bridge these systems and suggesting new directions for analyzing pattern formation in continuous dynamical systems.
Evolution of Collective AI Beyond Individual Optimization
Dec 03, 2024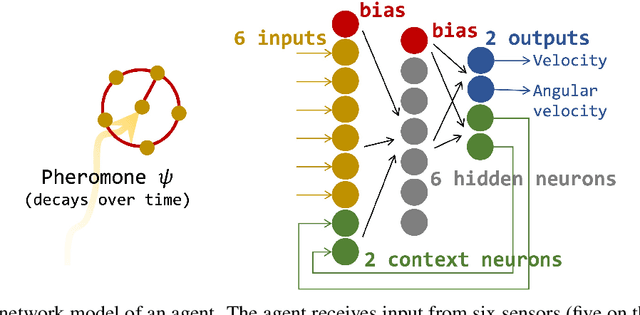
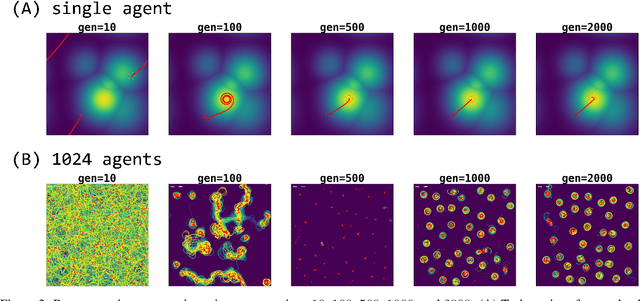
This study investigates collective behaviors that emerge from a group of homogeneous individuals optimized for a specific capability. We created a group of simple, identical neural network based agents modeled after chemotaxis-driven vehicles that follow pheromone trails and examined multi-agent simulations using clones of these evolved individuals. Our results show that the evolution of individuals led to population differentiation. Surprisingly, we observed that collective fitness significantly changed during later evolutionary stages, despite maintained high individual performance and simplified neural architectures. This decline occurred when agents developed reduced sensor-motor coupling, suggesting that over-optimization of individual agents almost always lead to less effective group behavior. Our research investigates how individual differentiation can evolve through what evolutionary pathways.
Spontaneous Emergence of Agent Individuality through Social Interactions in LLM-Based Communities
Nov 05, 2024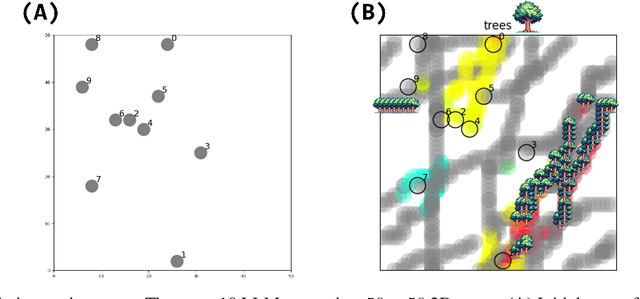
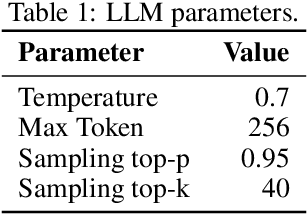
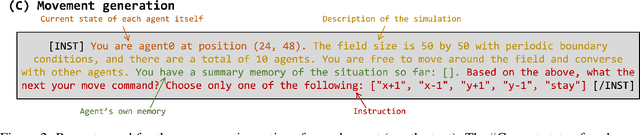
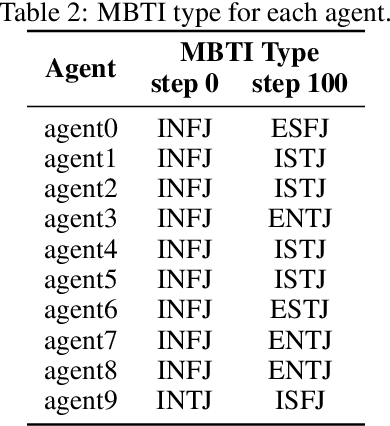
We study the emergence of agency from scratch by using Large Language Model (LLM)-based agents. In previous studies of LLM-based agents, each agent's characteristics, including personality and memory, have traditionally been predefined. We focused on how individuality, such as behavior, personality, and memory, can be differentiated from an undifferentiated state. The present LLM agents engage in cooperative communication within a group simulation, exchanging context-based messages in natural language. By analyzing this multi-agent simulation, we report valuable new insights into how social norms, cooperation, and personality traits can emerge spontaneously. This paper demonstrates that autonomously interacting LLM-powered agents generate hallucinations and hashtags to sustain communication, which, in turn, increases the diversity of words within their interactions. Each agent's emotions shift through communication, and as they form communities, the personalities of the agents emerge and evolve accordingly. This computational modeling approach and its findings will provide a new method for analyzing collective artificial intelligence.
A Simulation Environment for the Neuroevolution of Ant Colony Dynamics
Jun 19, 2024

We introduce a simulation environment to facilitate research into emergent collective behaviour, with a focus on replicating the dynamics of ant colonies. By leveraging real-world data, the environment simulates a target ant trail that a controllable agent must learn to replicate, using sensory data observed by the target ant. This work aims to contribute to the neuroevolution of models for collective behaviour, focusing on evolving neural architectures that encode domain-specific behaviours in the network topology. By evolving models that can be modified and studied in a controlled environment, we can uncover the necessary conditions required for collective behaviours to emerge. We hope this environment will be useful to those studying the role of interactions in emergent behaviour within collective systems.
Minimal Self in Humanoid Robot "Alter3" Driven by Large Language Model
Jun 17, 2024This paper introduces Alter3, a humanoid robot that demonstrates spontaneous motion generation through the integration of GPT-4, Large Language Model (LLM). This overcomes challenges in applying language models to direct robot control. By translating linguistic descriptions into actions, Alter3 can autonomously perform various tasks. The key aspect of humanoid robots is their ability to mimic human movement and emotions, allowing them to leverage human knowledge from language models. This raises the question of whether Alter3+GPT-4 can develop a "minimal self" with a sense of agency and ownership. This paper introduces mirror self-recognition and rubber hand illusion tests to assess Alter3's potential for a sense of self. The research suggests that even disembodied language models can develop agency when coupled with a physical robotic platform.
Adaptability and Homeostasis in the Game of Life interacting with the evolved Cellular Automata
May 09, 2024In this paper we study the emergence of homeostasis in a two-layer system of the Game of Life, in which the Game of Life in the first layer couples with another system of cellular automata in the second layer. Homeostasis is defined here as a space-time dynamic that regulates the number of cells in state-1 in the Game of Life layer. A genetic algorithm is used to evolve the rules of the second layer to control the pattern of the Game of Life. We discovered that there are two antagonistic attractors that control the numbers of cells in state-1 in the first layer. The homeostasis sustained by these attractors are compared with the homeostatic dynamics observed in Daisy World.
Self-Replicating and Self-Employed Smart Contract on Ethereum Blockchain
May 07, 2024


Blockchain is the underlying technology for cryptocurrencies such as Bitcoin. Blockchain is a robust distributed ledger that uses consensus algorithms to approve transactions in a decentralized manner, making malicious tampering extremely difficult. Ethereum, one of the blockchains, can be seen as an unstoppable computer which shared by users around the world that can run Turing-complete programs. In order to run any program on Ethereum, Ether (currency on Ethereum) is required. In other words, Ether can be seen as a kind of energy in the Ethereum world. We developed self-replicating and self-employed agents who earn the energy by themselves to replicate them, on the Ethereum blockchain. The agents can issued their token and gain Ether each time the tokens are sold. When a certain amount of Ether is accumulated, the agent replicates itself and leaves offspring. The goal of this project is to implement artificial agents that lives for itself, not as a tool for humans, in the open cyber space connected to the real world.
From Text to Motion: Grounding GPT-4 in a Humanoid Robot "Alter3"
Dec 11, 2023We report the development of Alter3, a humanoid robot capable of generating spontaneous motion using a Large Language Model (LLM), specifically GPT-4. This achievement was realized by integrating GPT-4 into our proprietary android, Alter3, thereby effectively grounding the LLM with Alter's bodily movement. Typically, low-level robot control is hardware-dependent and falls outside the scope of LLM corpora, presenting challenges for direct LLM-based robot control. However, in the case of humanoid robots like Alter3, direct control is feasible by mapping the linguistic expressions of human actions onto the robot's body through program code. Remarkably, this approach enables Alter3 to adopt various poses, such as a 'selfie' stance or 'pretending to be a ghost,' and generate sequences of actions over time without explicit programming for each body part. This demonstrates the robot's zero-shot learning capabilities. Additionally, verbal feedback can adjust poses, obviating the need for fine-tuning. A video of Alter3's generated motions is available at https://tnoinkwms.github.io/ALTER-LLM/
Implementation of Lenia as a Reaction-Diffusion System
May 23, 2023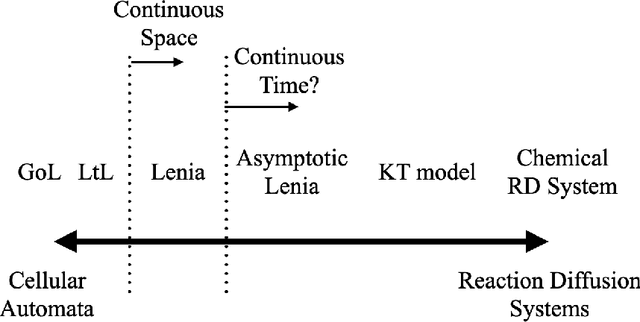
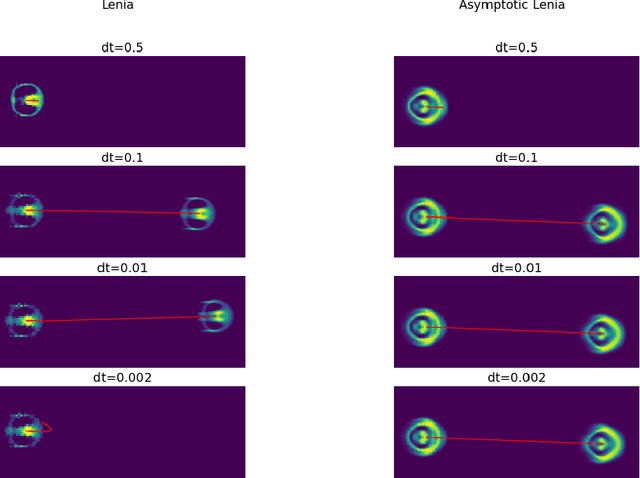
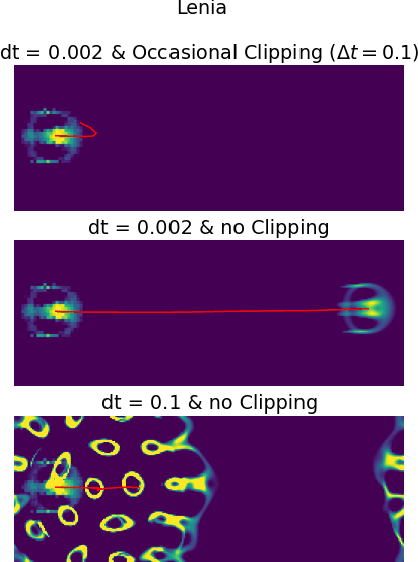
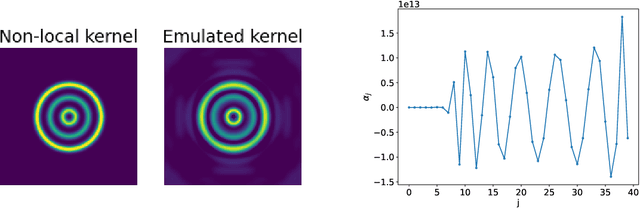
The relationship between reaction-diffusion (RD) systems, characterized by continuous spatiotemporal states, and cellular automata (CA), marked by discrete spatiotemporal states, remains poorly understood. This paper delves into this relationship through an examination of a recently developed CA known as Lenia. We demonstrate that asymptotic Lenia, a variant of Lenia, can be comprehensively described by differential equations, and, unlike the original Lenia, it is independent of time-step ticks. Further, we establish that this formulation is mathematically equivalent to a generalization of the kernel-based Turing model (KT model). Stemming from these insights, we establish that asymptotic Lenia can be replicated by an RD system composed solely of diffusion and spatially local reaction terms, resulting in the simulated asymptotic Lenia based on an RD system, or "RD Lenia". However, our RD Lenia cannot be construed as a chemical system since the reaction term fails to satisfy mass-action kinetics.