 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Law in Neural Data: Non-Invasive Speech Decoding with 175 Hours of EEG Data
Jul 10, 2024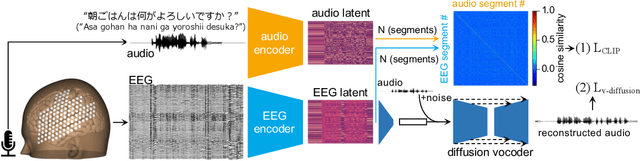


Brain-computer interfaces (BCIs) hold great potential for aiding individuals with speech impairments. Utilizing electroencephalography (EEG) to decode speech is particularly promising due to its non-invasive nature. However, recordings are typically short, and the high variability in EEG data has led researchers to focus on classification tasks with a few dozen classes. To assess its practical applicability for speech neuroprostheses, we investigate the relationship between the size of EEG data and decoding accuracy in the open vocabulary setting. We collected extensive EEG data from a single participant (175 hours) and conducted zero-shot speech segment classification using self-supervised representation learning. The model trained on the entire dataset achieved a top-1 accuracy of 48\% and a top-10 accuracy of 76\%, while mitigating the effects of myopotential artifacts. Conversely, when the data was limited to the typical amount used in practice ($\sim$10 hours), the top-1 accuracy dropped to 2.5\%, revealing a significant scaling effect. Additionally, as the amount of training data increased, the EEG latent representation progressively exhibited clearer temporal structures of spoken phrases. This indicates that the decoder can recognize speech segments in a data-driven manner without explicit measurements of word recognition. This research marks a significant step towards the practical realization of EEG-based speech BCIs.
A Simulation Environment for the Neuroevolution of Ant Colony Dynamics
Jun 19, 2024

We introduce a simulation environment to facilitate research into emergent collective behaviour, with a focus on replicating the dynamics of ant colonies. By leveraging real-world data, the environment simulates a target ant trail that a controllable agent must learn to replicate, using sensory data observed by the target ant. This work aims to contribute to the neuroevolution of models for collective behaviour, focusing on evolving neural architectures that encode domain-specific behaviours in the network topology. By evolving models that can be modified and studied in a controlled environment, we can uncover the necessary conditions required for collective behaviours to emerge. We hope this environment will be useful to those studying the role of interactions in emergent behaviour within collective systems.