 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of a Gecko-Adhesive Gripper for the Astrobee Free-Flying Robot
Sep 19, 2020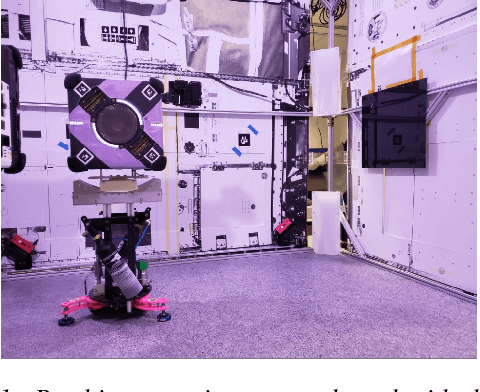

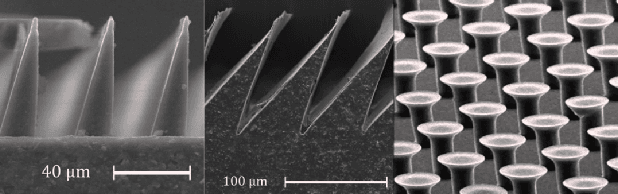
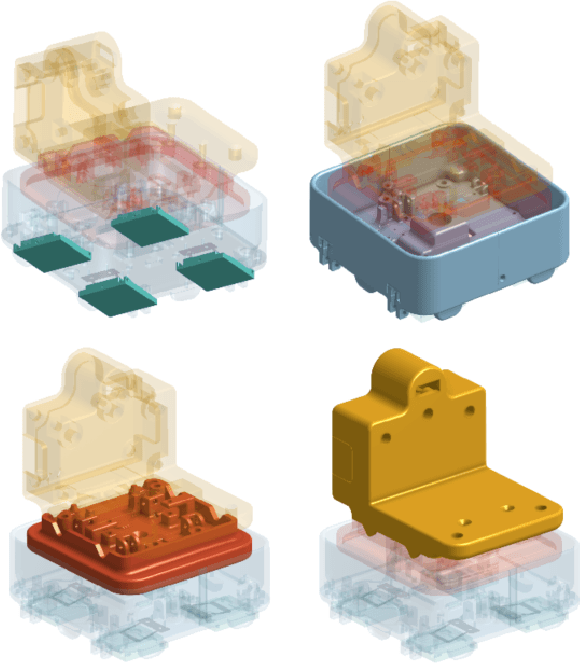
Assistive free-flying robots are a promising platform for supporting and working alongside astronauts in carrying out tasks that require interaction with the environment. However, current free-flying robot platforms are limited by existing manipulation technologies in being able to grasp and manipulate surrounding objects. Instead, gecko-inspired adhesives offer many advantages for an alternate grasping and manipulation paradigm for use in assistive free-flyer applications. In this work, we present the design of a gecko-inspired adhesive gripper for performing perching and grasping maneuvers for the Astrobee robot, a free-flying robot currently operating on-board the International Space Station. We present software and hardware integration details for the gripper units that were launched to the International Space Station in 2019 for in-flight experiments with Astrobee. Finally, we present preliminary results for on-ground experiments conducted with the gripper and Astrobee on a free-floating spacecraft test bed.
Hybrid Machine Learning Models of Classifying Residential Requests for Smart Dispatching
Dec 22, 2019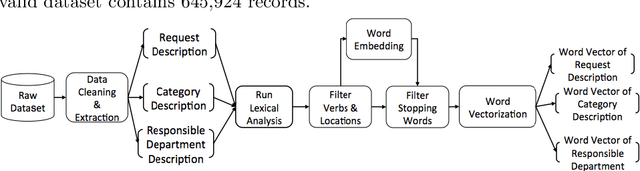
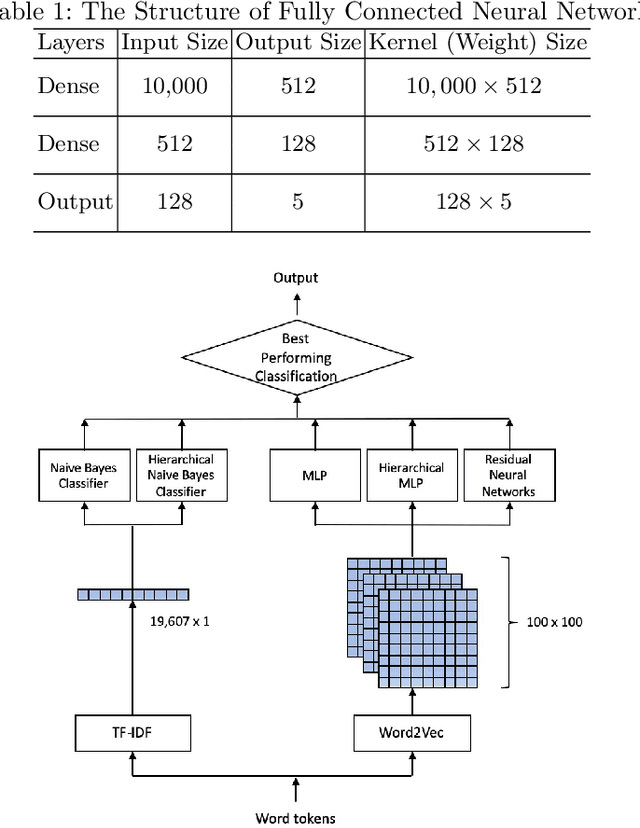
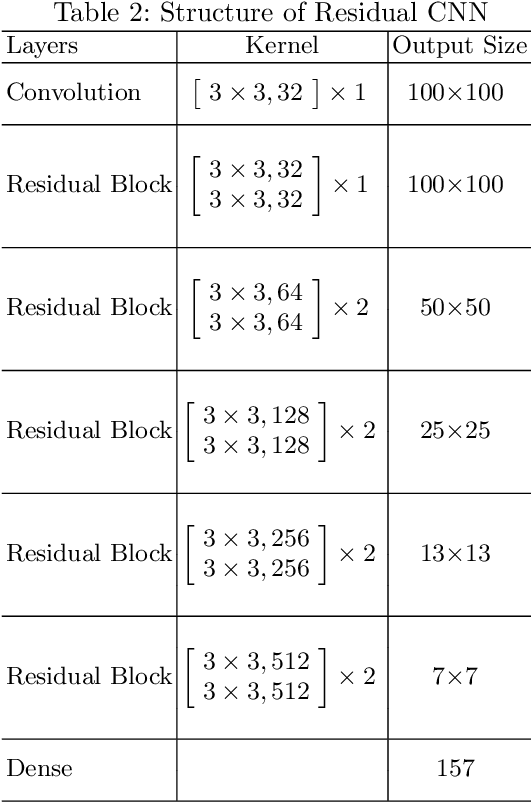
This paper presents a hybrid machine learning method of classifying residential requests in natural language to responsible departments that provide timely responses back to residents under the vision of digital government services in smart cities. Residential requests in natural language descriptions cover almost every aspect of a city's daily operation. Hence the responsible departments are fine-grained to even the level of local communities. There are no specific general categories or labels for each request sample. This causes two issues for supervised classification solutions, namely (1) the request sample data is unbalanced and (2) lack of specific labels for training. To solve these issues, we investigate a hybrid machine learning method that generates meta-class labels by means of unsupervised clustering algorithms; applies two-word embedding methods with three classifiers (including two hierarchical classifiers and one residual convolutional neural network); and selects the best performing classifier as the classification result. We demonstrate our approach performing better classification tasks compared to two benchmarking machine learning models, Naive Bayes classifier and a Multiple Layer Perceptron (MLP). In addition, the hierarchical classification method provides insights into the source of classification errors.
Sequential geophysical and flow inversion to characterize fracture networks in subsurface systems
Jul 13, 2017
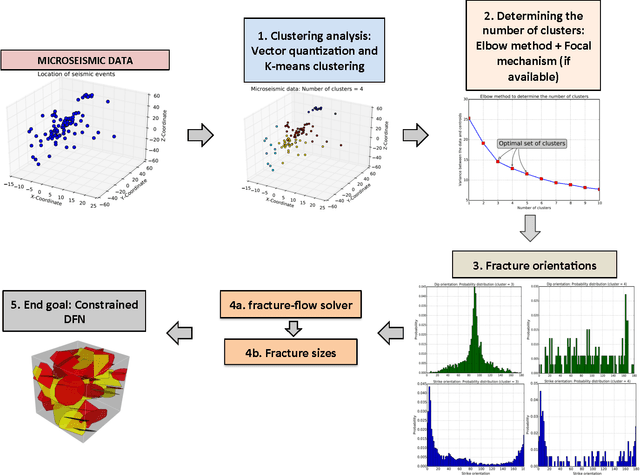


Subsurface applications including geothermal, geological carbon sequestration, oil and gas, etc., typically involve maximizing either the extraction of energy or the storage of fluids. Characterizing the subsurface is extremely complex due to heterogeneity and anisotropy. Due to this complexity, there are uncertainties in the subsurface parameters, which need to be estimated from multiple diverse as well as fragmented data streams. In this paper, we present a non-intrusive sequential inversion framework, for integrating data from geophysical and flow sources to constraint subsurface Discrete Fracture Networks (DFN). In this approach, we first estimate bounds on the statistics for the DFN fracture orientations using microseismic data. These bounds are estimated through a combination of a focal mechanism (physics-based approach) and clustering analysis (statistical approach) of seismic data. Then, the fracture lengths are constrained based on the flow data. The efficacy of this multi-physics based sequential inversion is demonstrated through a representative synthetic example.