 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA machine learning approach to galaxy properties: Joint redshift - stellar mass probability distributions with Random Forest
Dec 10, 2020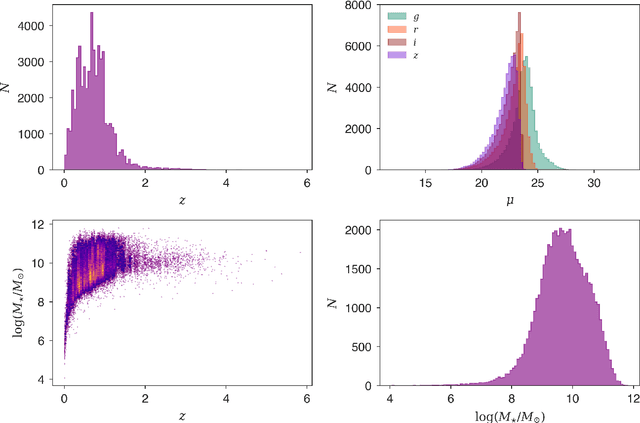
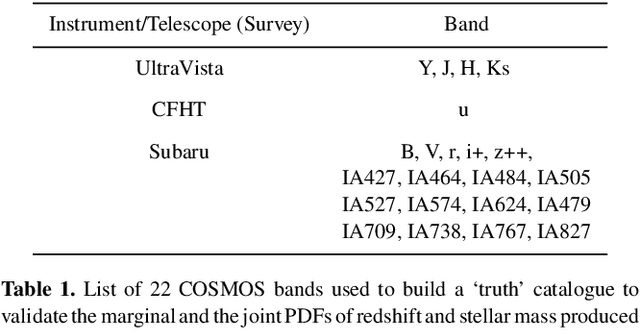
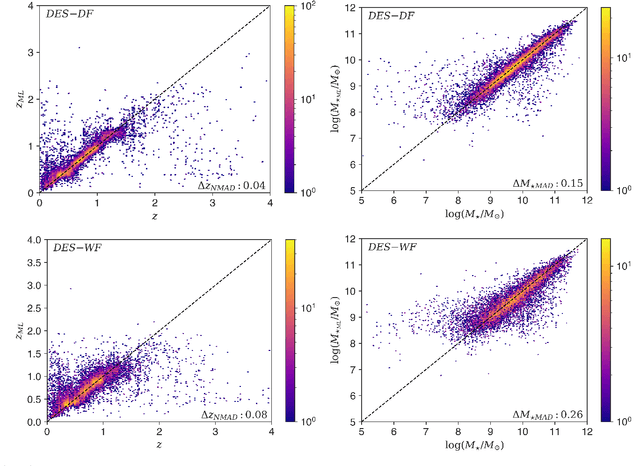
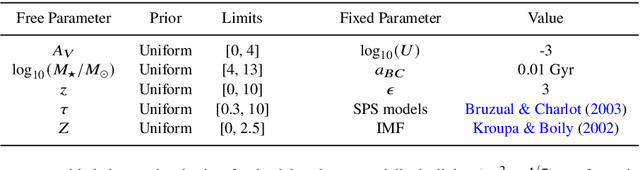
We demonstrate that highly accurate joint redshift - stellar mass PDFs can be obtained using the Random Forest (RF) machine learning (ML) algorithm, even with few photometric bands available. As an example, we use the Dark Energy Survey (DES), combined with the COSMOS2015 catalogue for redshifts and stellar masses. We build two ML models: one containing deep photometry in the $griz$ bands, and the second reflecting the photometric scatter present in the main DES survey, with carefully constructed representative training data in each case. We validate our joint PDFs for $10,699$ test galaxies by utilising the copula probability integral transform (copPIT) and the Kendall distribution function, and their univariate counterparts to validate the marginals. Benchmarked against a basic set-up of the template-fitting code BAGPIPES, our ML-based method outperforms template fitting on all of our pre-defined performance metrics. In addition to accuracy, the RF is extremely fast, able to compute joint PDFs for a million galaxies in just over $2$ hours with consumer computer hardware. Such speed enables PDFs to be derived in real-time within analysis codes, solving potential storage issues. As part of this work we have developed GALPRO, a highly intuitive and efficient Python package to rapidly generate multivariate PDFs on-the-fly. GALPRO is documented and available for researchers to use in their cosmology and galaxy evolution studies at https://galpro.readthedocs.io/.
Hybrid Machine Learning Models of Classifying Residential Requests for Smart Dispatching
Dec 22, 2019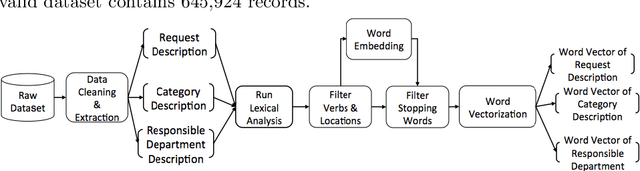
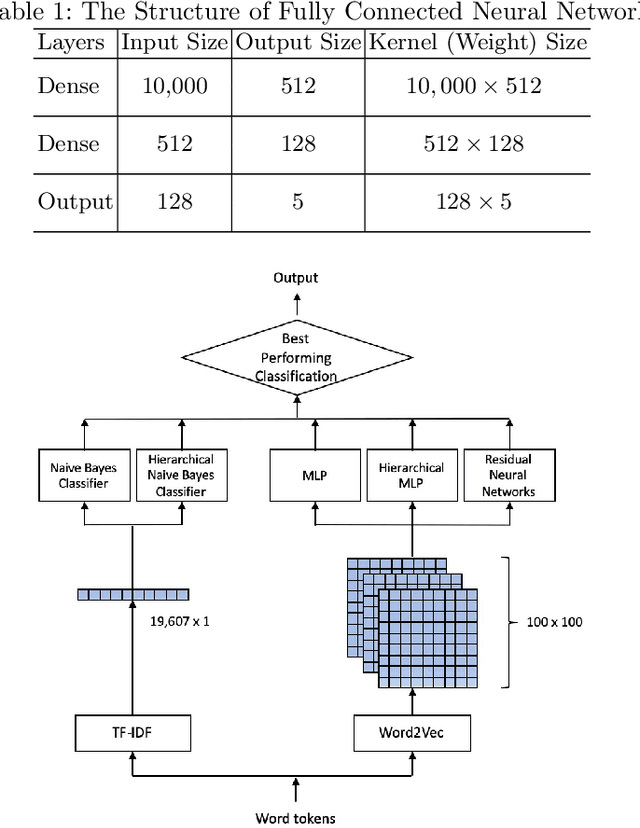
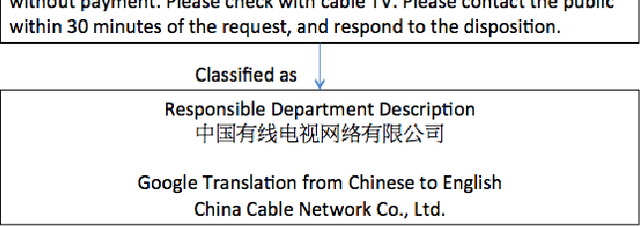
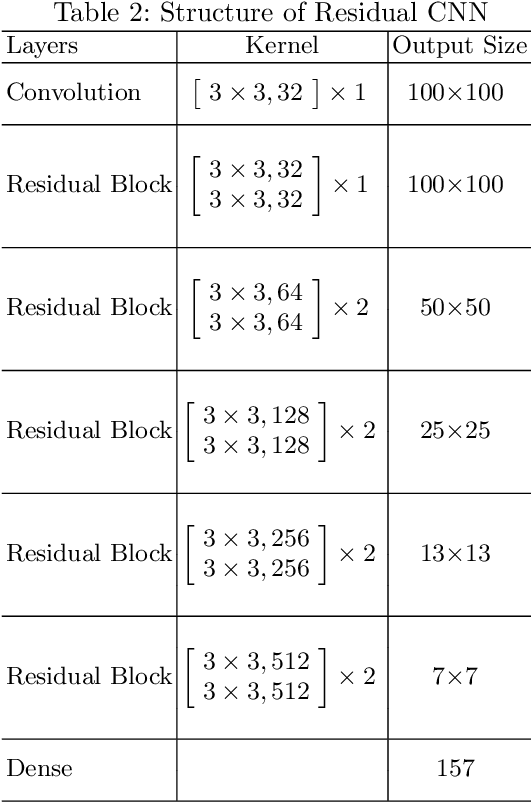
This paper presents a hybrid machine learning method of classifying residential requests in natural language to responsible departments that provide timely responses back to residents under the vision of digital government services in smart cities. Residential requests in natural language descriptions cover almost every aspect of a city's daily operation. Hence the responsible departments are fine-grained to even the level of local communities. There are no specific general categories or labels for each request sample. This causes two issues for supervised classification solutions, namely (1) the request sample data is unbalanced and (2) lack of specific labels for training. To solve these issues, we investigate a hybrid machine learning method that generates meta-class labels by means of unsupervised clustering algorithms; applies two-word embedding methods with three classifiers (including two hierarchical classifiers and one residual convolutional neural network); and selects the best performing classifier as the classification result. We demonstrate our approach performing better classification tasks compared to two benchmarking machine learning models, Naive Bayes classifier and a Multiple Layer Perceptron (MLP). In addition, the hierarchical classification method provides insights into the source of classification errors.
Hybrid 3-D Formation Control for Unmanned Helicopters
Aug 17, 2011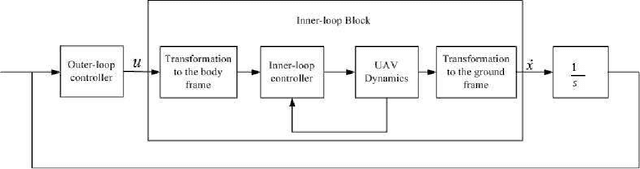
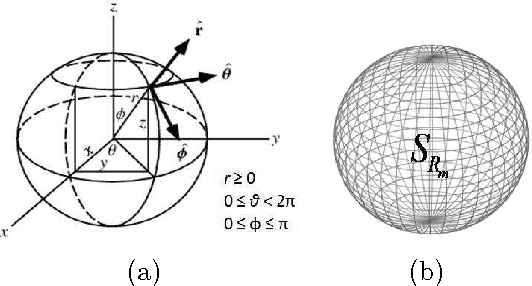
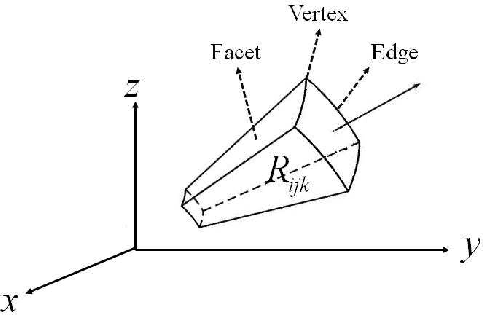
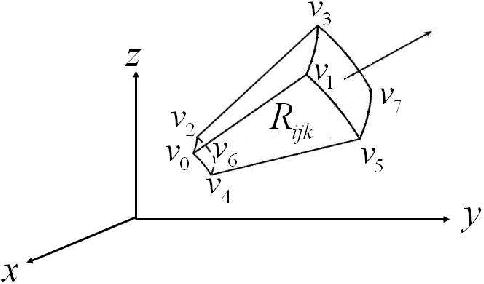
Teams of Unmanned Aerial Vehicles (UAVs) form typical networked cyber-physical systems that involve the interaction of discrete logic and continuous dynamics. This paper presents a hybrid supervisory control framework for the three-dimensional leader follower formation control of unmanned helicopters. The proposed hybrid control framework captures internal interactions between the decision making unit and the path planner continuous dynamics of the system, and hence improves the system's overall reliability. To design such a hybrid controller, a spherical abstraction of the state space is proposed as a new method of abstraction. Utilizing the properties of multi-affine functions over the partitioned space leads to a finite state Discrete Event System (DES) model, which is shown to be bisimilar to the original continuous-variable dynamical system. Then, in the discrete domain, a logic supervisor is modularly designed for the abstracted model. Due to the bisimilarity between the abstracted DES model and the original UAV dynamics, the designed logic supervisor can be implemented as a hybrid controller through an interface layer. This supervisor drives the UAV dynamics to satisfy the design requirements. In other words, the hybrid controller is able to bring the UAVs to the desired formation starting from any initial state inside the control horizon and then, maintain the formation. Moreover, a collision avoidance mechanism is embedded in the designed supervisor. Finally, the algorithm has been verified by a hardware-in-the-loop simulation platform, which is developed for unmanned helicopters. The presented results show the effectiveness of the algorithm.