 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Eigenspace Network and Its Application to Parametric Non-selfadjoint Eigenvalue Problems
Dec 23, 2025We consider operator learning for efficiently solving parametric non-selfadjoint eigenvalue problems. To overcome the spectral instability and mode switching inherent in non-selfadjoint operators, we introduce a hybrid framework that learns the stable invariant eigensubspace mapping rather than individual eigenfunctions. We proposed a Deep Eigenspace Network (DEN) architecture integrating Fourier Neural Operators, geometry-adaptive POD bases, and explicit banded cross-mode mixing mechanisms to capture complex spectral dependencies on unstructured meshes. We apply DEN to the parametric non-selfadjoint Steklov eigenvalue problem and provide theoretical proofs for the Lipschitz continuity of the eigensubspace with respect to the parameters. In addition, we derive error bounds for the reconstruction of the eigenspace. Numerical experiments validate DEN's high accuracy and zero-shot generalization capabilities across different discretizations.
CPSOR-GCN: A Vehicle Trajectory Prediction Method Powered by Emotion and Cognitive Theory
Nov 14, 2023



Active safety systems on vehicles often face problems with false alarms. Most active safety systems predict the driver's trajectory with the assumption that the driver is always in a normal emotion, and then infer risks. However, the driver's trajectory uncertainty increases under abnormal emotions. This paper proposes a new trajectory prediction model: CPSOR-GCN, which predicts vehicle trajectories under abnormal emotions. At the physical level, the interaction features between vehicles are extracted by the physical GCN module. At the cognitive level, SOR cognitive theory is used as prior knowledge to build a Dynamic Bayesian Network (DBN) structure. The conditional probability and state transition probability of nodes from the calibrated SOR-DBN quantify the causal relationship between cognitive factors, which is embedded into the cognitive GCN module to extract the characteristics of the influence mechanism of emotions on driving behavior. The CARLA-SUMO joint driving simulation platform was built to develop dangerous pre-crash scenarios. Methods of recreating traffic scenes were used to naturally induce abnormal emotions. The experiment collected data from 26 participants to verify the proposed model. Compared with the model that only considers physical motion features, the prediction accuracy of the proposed model is increased by 68.70%. Furthermore,considering the SOR-DBN reduces the prediction error of the trajectory by 15.93%. Compared with other advanced trajectory prediction models, the results of CPSOR-GCN also have lower errors. This model can be integrated into active safety systems to better adapt to the driver's emotions, which could effectively reduce false alarms.
Hybrid Machine Learning Models of Classifying Residential Requests for Smart Dispatching
Dec 22, 2019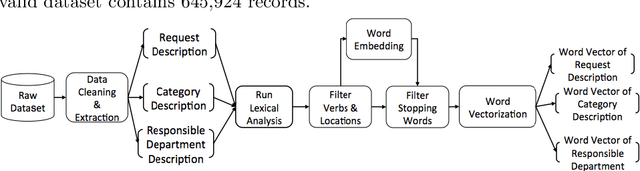
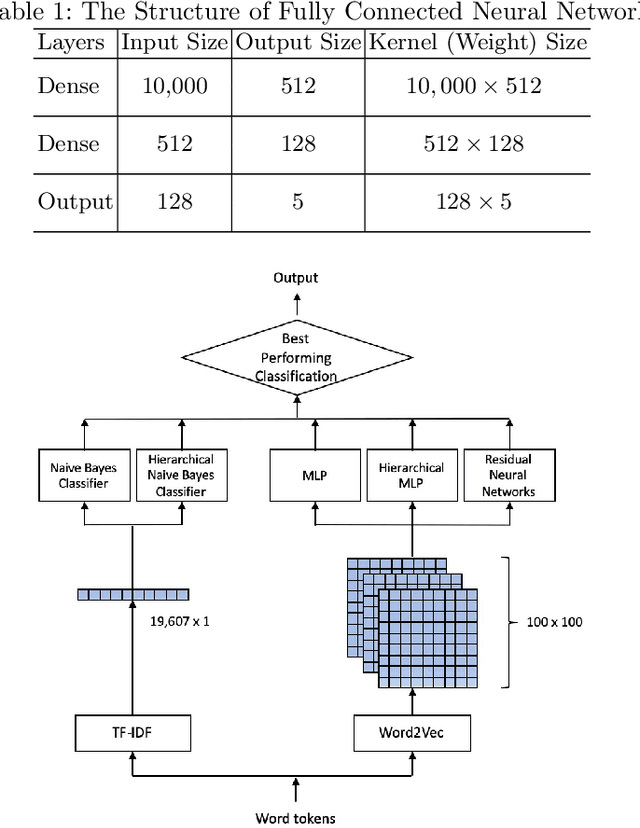
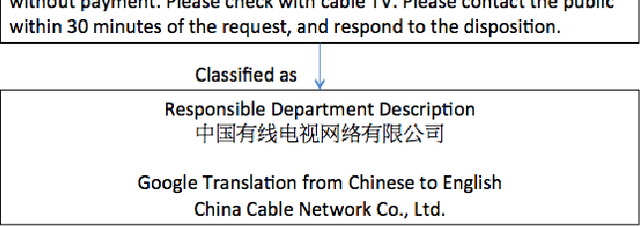
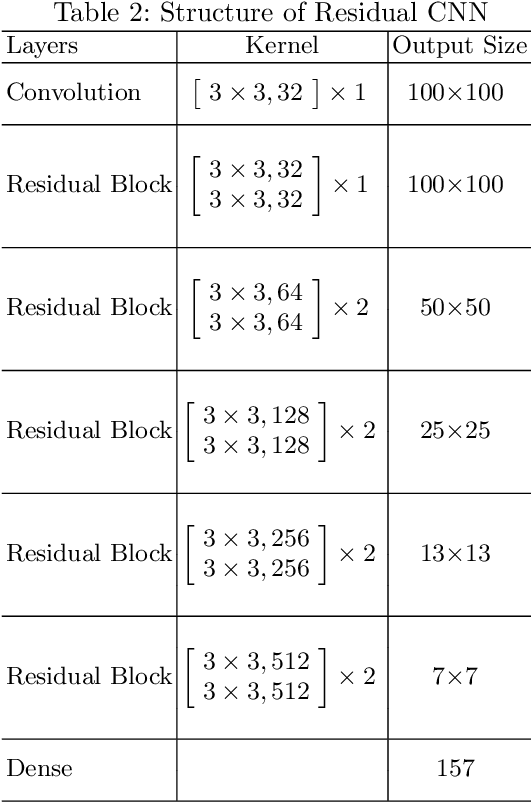
This paper presents a hybrid machine learning method of classifying residential requests in natural language to responsible departments that provide timely responses back to residents under the vision of digital government services in smart cities. Residential requests in natural language descriptions cover almost every aspect of a city's daily operation. Hence the responsible departments are fine-grained to even the level of local communities. There are no specific general categories or labels for each request sample. This causes two issues for supervised classification solutions, namely (1) the request sample data is unbalanced and (2) lack of specific labels for training. To solve these issues, we investigate a hybrid machine learning method that generates meta-class labels by means of unsupervised clustering algorithms; applies two-word embedding methods with three classifiers (including two hierarchical classifiers and one residual convolutional neural network); and selects the best performing classifier as the classification result. We demonstrate our approach performing better classification tasks compared to two benchmarking machine learning models, Naive Bayes classifier and a Multiple Layer Perceptron (MLP). In addition, the hierarchical classification method provides insights into the source of classification errors.