 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid 3-D Formation Control for Unmanned Helicopters
Aug 17, 2011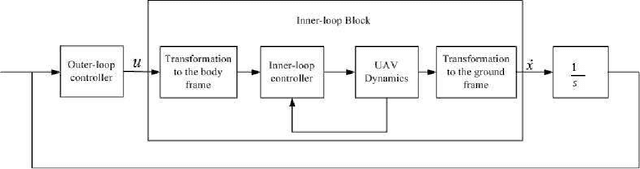
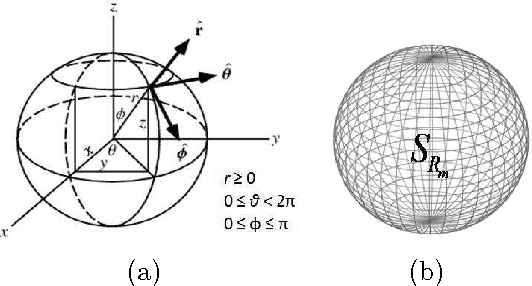
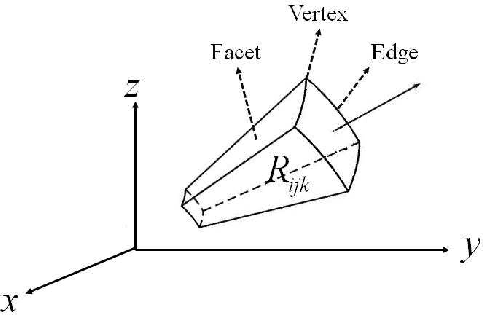
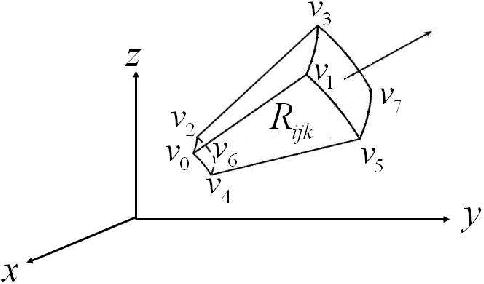
Teams of Unmanned Aerial Vehicles (UAVs) form typical networked cyber-physical systems that involve the interaction of discrete logic and continuous dynamics. This paper presents a hybrid supervisory control framework for the three-dimensional leader follower formation control of unmanned helicopters. The proposed hybrid control framework captures internal interactions between the decision making unit and the path planner continuous dynamics of the system, and hence improves the system's overall reliability. To design such a hybrid controller, a spherical abstraction of the state space is proposed as a new method of abstraction. Utilizing the properties of multi-affine functions over the partitioned space leads to a finite state Discrete Event System (DES) model, which is shown to be bisimilar to the original continuous-variable dynamical system. Then, in the discrete domain, a logic supervisor is modularly designed for the abstracted model. Due to the bisimilarity between the abstracted DES model and the original UAV dynamics, the designed logic supervisor can be implemented as a hybrid controller through an interface layer. This supervisor drives the UAV dynamics to satisfy the design requirements. In other words, the hybrid controller is able to bring the UAVs to the desired formation starting from any initial state inside the control horizon and then, maintain the formation. Moreover, a collision avoidance mechanism is embedded in the designed supervisor. Finally, the algorithm has been verified by a hardware-in-the-loop simulation platform, which is developed for unmanned helicopters. The presented results show the effectiveness of the algorithm.
An Evolutionary Algorithm with Advanced Goal and Priority Specification for Multi-objective Optimization
Jun 01, 2011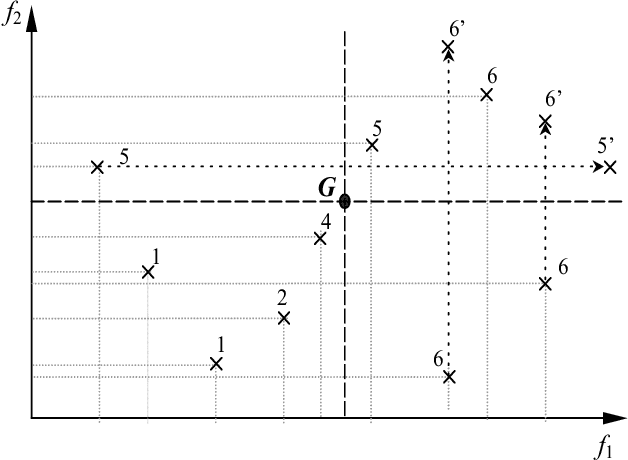



This paper presents an evolutionary algorithm with a new goal-sequence domination scheme for better decision support in multi-objective optimization. The approach allows the inclusion of advanced hard/soft priority and constraint information on each objective component, and is capable of incorporating multiple specifications with overlapping or non-overlapping objective functions via logical 'OR' and 'AND' connectives to drive the search towards multiple regions of trade-off. In addition, we propose a dynamic sharing scheme that is simple and adaptively estimated according to the on-line population distribution without needing any a priori parameter setting. Each feature in the proposed algorithm is examined to show its respective contribution, and the performance of the algorithm is compared with other evolutionary optimization methods. It is shown that the proposed algorithm has performed well in the diversity of evolutionary search and uniform distribution of non-dominated individuals along the final trade-offs, without significant computational effort. The algorithm is also applied to the design optimization of a practical servo control system for hard disk drives with a single voice-coil-motor actuator. Results of the evolutionary designed servo control system show a superior closed-loop performance compared to classical PID or RPT approaches.