 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Long-endurance Flight: Design and Implementation of a Variable-pitch Gasoline-engine Quadrotor
Aug 09, 2017



Majority of today's fixed-pitch, electric-power quadrotors have short flight endurance ($<$ 1 hour) which greatly limits their applications. This paper presents a design methodology for the construction of a long-endurance quadrotor using variable-pitch rotors and a gasoline-engine. The methodology consists of three aspects. Firstly, the rotor blades and gasoline engine are selected as a pair, so that sufficient lift can be comfortably provided by the engine. Secondly, drivetrain and airframe are designed. Major challenges include airframe vibration minimization and power transmission from one engine to four rotors while keeping alternate rotors contra-rotating. Lastly, a PD controller is tuned to facilitate preliminary flight tests. The methodology has been verified by the construction and successful flight of our gasoline quadrotor prototype, which is designed to have a flight time of 2 to 3 hours and a maximum take-off weight of 10 kg.
* 6 pages
Hybrid 3-D Formation Control for Unmanned Helicopters
Aug 17, 2011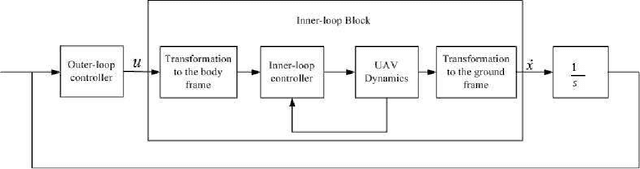
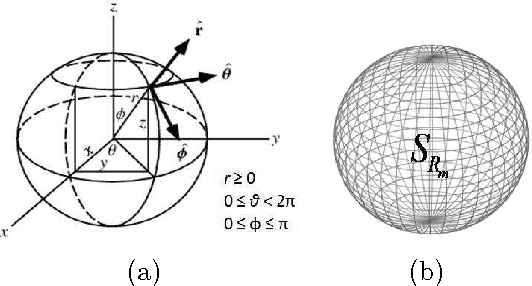
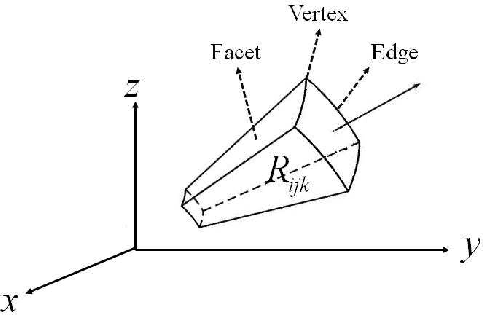
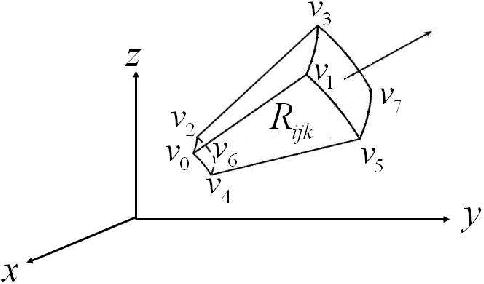
Teams of Unmanned Aerial Vehicles (UAVs) form typical networked cyber-physical systems that involve the interaction of discrete logic and continuous dynamics. This paper presents a hybrid supervisory control framework for the three-dimensional leader follower formation control of unmanned helicopters. The proposed hybrid control framework captures internal interactions between the decision making unit and the path planner continuous dynamics of the system, and hence improves the system's overall reliability. To design such a hybrid controller, a spherical abstraction of the state space is proposed as a new method of abstraction. Utilizing the properties of multi-affine functions over the partitioned space leads to a finite state Discrete Event System (DES) model, which is shown to be bisimilar to the original continuous-variable dynamical system. Then, in the discrete domain, a logic supervisor is modularly designed for the abstracted model. Due to the bisimilarity between the abstracted DES model and the original UAV dynamics, the designed logic supervisor can be implemented as a hybrid controller through an interface layer. This supervisor drives the UAV dynamics to satisfy the design requirements. In other words, the hybrid controller is able to bring the UAVs to the desired formation starting from any initial state inside the control horizon and then, maintain the formation. Moreover, a collision avoidance mechanism is embedded in the designed supervisor. Finally, the algorithm has been verified by a hardware-in-the-loop simulation platform, which is developed for unmanned helicopters. The presented results show the effectiveness of the algorithm.