 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial-Intelligence-Based Design for Circuit Parameters of Power Converters
Jul 30, 2023Parameter design is significant in ensuring a satisfactory holistic performance of power converters. Generally, circuit parameter design for power converters consists of two processes: analysis and deduction process and optimization process. The existing approaches for parameter design consist of two types: traditional approach and computer-aided optimization (CAO) approach. In the traditional approaches, heavy human-dependence is required. Even though the emerging CAO approaches automate the optimization process, they still require manual analysis and deduction process. To mitigate human-dependence for the sake of high accuracy and easy implementation, an artificial-intelligence-based design (AI-D) approach is proposed in this article for the parameter design of power converters. In the proposed AI-D approach, to achieve automation in the analysis and deduction process, simulation tools and batch-normalization neural network (BN-NN) are adopted to build data-driven models for the optimization objectives and design constraints. Besides, to achieve automation in the optimization process, genetic algorithm is used to search for optimal design results. The proposed AI-D approach is validated in the circuit parameter design of the synchronous buck converter in the 48 to 12 V accessory-load power supply system in electric vehicle. The design case of an efficiency-optimal synchronous buck converter with constraints in volume, voltage ripple, and current ripple is provided. In the end of this article, feasibility and accuracy of the proposed AI-D approach have been validated by hardware experiments.
Towards Long-endurance Flight: Design and Implementation of a Variable-pitch Gasoline-engine Quadrotor
Aug 09, 2017



Majority of today's fixed-pitch, electric-power quadrotors have short flight endurance ($<$ 1 hour) which greatly limits their applications. This paper presents a design methodology for the construction of a long-endurance quadrotor using variable-pitch rotors and a gasoline-engine. The methodology consists of three aspects. Firstly, the rotor blades and gasoline engine are selected as a pair, so that sufficient lift can be comfortably provided by the engine. Secondly, drivetrain and airframe are designed. Major challenges include airframe vibration minimization and power transmission from one engine to four rotors while keeping alternate rotors contra-rotating. Lastly, a PD controller is tuned to facilitate preliminary flight tests. The methodology has been verified by the construction and successful flight of our gasoline quadrotor prototype, which is designed to have a flight time of 2 to 3 hours and a maximum take-off weight of 10 kg.
* 6 pages
Discovering Classes of Strongly Equivalent Logic Programs
Oct 12, 2011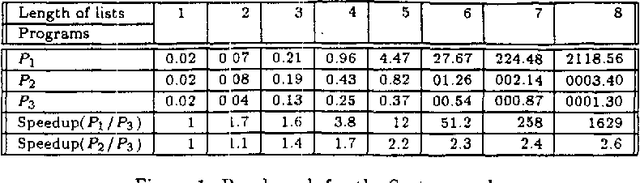
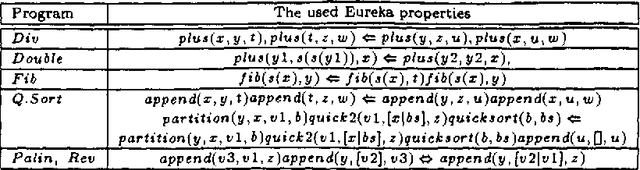
In this paper we apply computer-aided theorem discovery technique to discover theorems about strongly equivalent logic programs under the answer set semantics. Our discovered theorems capture new classes of strongly equivalent logic programs that can lead to new program simplification rules that preserve strong equivalence. Specifically, with the help of computers, we discovered exact conditions that capture the strong equivalence between a rule and the empty set, between two rules, between two rules and one of the two rules, between two rules and another rule, and between three rules and two of the three rules.
Compiling Causal Theories to Successor State Axioms and STRIPS-Like Systems
Jun 24, 2011We describe a system for specifying the effects of actions. Unlike those commonly used in AI planning, our system uses an action description language that allows one to specify the effects of actions using domain rules, which are state constraints that can entail new action effects from old ones. Declaratively, an action domain in our language corresponds to a nonmonotonic causal theory in the situation calculus. Procedurally, such an action domain is compiled into a set of logical theories, one for each action in the domain, from which fully instantiated successor state-like axioms and STRIPS-like systems are then generated. We expect the system to be a useful tool for knowledge engineers writing action specifications for classical AI planning systems, GOLOG systems, and other systems where formal specifications of actions are needed.