 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Development of a Gecko-Adhesive Gripper for the Astrobee Free-Flying Robot
Paper and Code
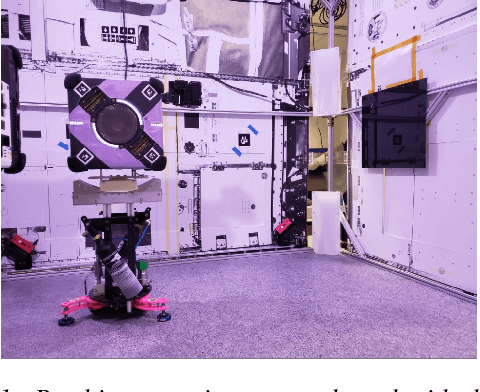

Assistive free-flying robots are a promising platform for supporting and working alongside astronauts in carrying out tasks that require interaction with the environment. However, current free-flying robot platforms are limited by existing manipulation technologies in being able to grasp and manipulate surrounding objects. Instead, gecko-inspired adhesives offer many advantages for an alternate grasping and manipulation paradigm for use in assistive free-flyer applications. In this work, we present the design of a gecko-inspired adhesive gripper for performing perching and grasping maneuvers for the Astrobee robot, a free-flying robot currently operating on-board the International Space Station. We present software and hardware integration details for the gripper units that were launched to the International Space Station in 2019 for in-flight experiments with Astrobee. Finally, we present preliminary results for on-ground experiments conducted with the gripper and Astrobee on a free-floating spacecraft test bed.