 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating Multi-Suction Item Picking at Scale via Multi-Modal Learning of Pick Success
Jun 12, 2025This work demonstrates how autonomously learning aspects of robotic operation from sparsely-labeled, real-world data of deployed, engineered solutions at industrial scale can provide with solutions that achieve improved performance. Specifically, it focuses on multi-suction robot picking and performs a comprehensive study on the application of multi-modal visual encoders for predicting the success of candidate robotic picks. Picking diverse items from unstructured piles is an important and challenging task for robot manipulation in real-world settings, such as warehouses. Methods for picking from clutter must work for an open set of items while simultaneously meeting latency constraints to achieve high throughput. The demonstrated approach utilizes multiple input modalities, such as RGB, depth and semantic segmentation, to estimate the quality of candidate multi-suction picks. The strategy is trained from real-world item picking data, with a combination of multimodal pretrain and finetune. The manuscript provides comprehensive experimental evaluation performed over a large item-picking dataset, an item-picking dataset targeted to include partial occlusions, and a package-picking dataset, which focuses on containers, such as boxes and envelopes, instead of unpackaged items. The evaluation measures performance for different item configurations, pick scenes, and object types. Ablations help to understand the effects of in-domain pretraining, the impact of different modalities and the importance of finetuning. These ablations reveal both the importance of training over multiple modalities but also the ability of models to learn during pretraining the relationship between modalities so that during finetuning and inference, only a subset of them can be used as input.
Value Explicit Pretraining for Goal-Based Transfer Learning
Dec 19, 2023



We propose a method that allows for learning task-agnostic representations based on value function estimates from a sequence of observations where the last frame corresponds to a goal. These representations would learn to relate states across different tasks, based on the temporal distance to the goal state, irrespective of the appearance changes and dynamics. This method could be used to transfer learnt policies/skills to unseen related tasks.
Q-Transformer: Scalable Offline Reinforcement Learning via Autoregressive Q-Functions
Sep 18, 2023



In this work, we present a scalable reinforcement learning method for training multi-task policies from large offline datasets that can leverage both human demonstrations and autonomously collected data. Our method uses a Transformer to provide a scalable representation for Q-functions trained via offline temporal difference backups. We therefore refer to the method as Q-Transformer. By discretizing each action dimension and representing the Q-value of each action dimension as separate tokens, we can apply effective high-capacity sequence modeling techniques for Q-learning. We present several design decisions that enable good performance with offline RL training, and show that Q-Transformer outperforms prior offline RL algorithms and imitation learning techniques on a large diverse real-world robotic manipulation task suite. The project's website and videos can be found at https://q-transformer.github.io
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022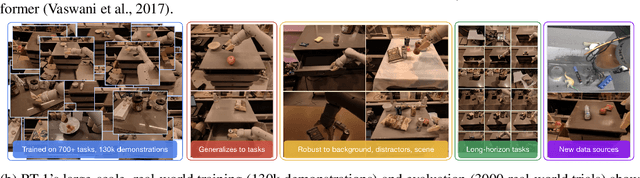
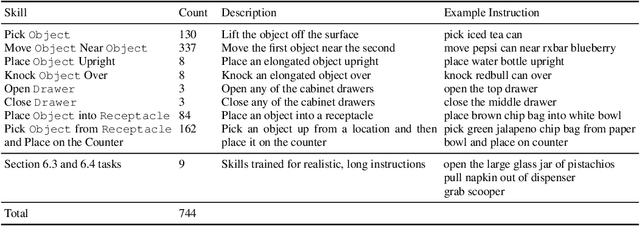
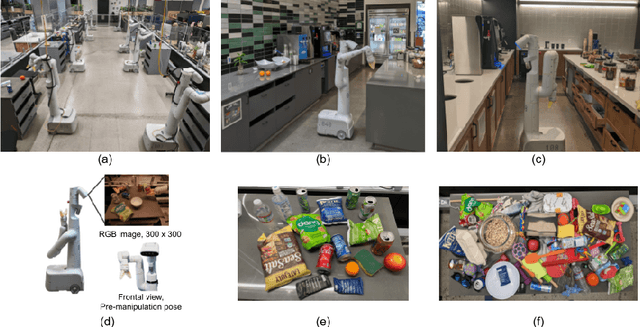
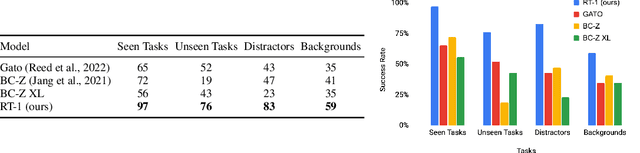
By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io