 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilizing Large Language Models for Machine Learning Explainability
Oct 08, 2025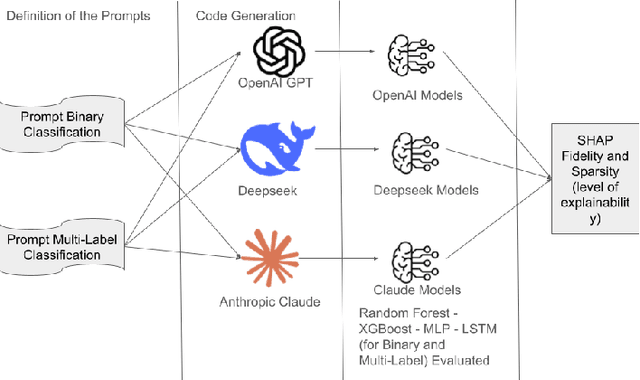
This study explores the explainability capabilities of large language models (LLMs), when employed to autonomously generate machine learning (ML) solutions. We examine two classification tasks: (i) a binary classification problem focused on predicting driver alertness states, and (ii) a multilabel classification problem based on the yeast dataset. Three state-of-the-art LLMs (i.e. OpenAI GPT, Anthropic Claude, and DeepSeek) are prompted to design training pipelines for four common classifiers: Random Forest, XGBoost, Multilayer Perceptron, and Long Short-Term Memory networks. The generated models are evaluated in terms of predictive performance (recall, precision, and F1-score) and explainability using SHAP (SHapley Additive exPlanations). Specifically, we measure Average SHAP Fidelity (Mean Squared Error between SHAP approximations and model outputs) and Average SHAP Sparsity (number of features deemed influential). The results reveal that LLMs are capable of producing effective and interpretable models, achieving high fidelity and consistent sparsity, highlighting their potential as automated tools for interpretable ML pipeline generation. The results show that LLMs can produce effective, interpretable pipelines with high fidelity and consistent sparsity, closely matching manually engineered baselines.
RAG Playground: A Framework for Systematic Evaluation of Retrieval Strategies and Prompt Engineering in RAG Systems
Dec 16, 2024

We present RAG Playground, an open-source framework for systematic evaluation of Retrieval-Augmented Generation (RAG) systems. The framework implements and compares three retrieval approaches: naive vector search, reranking, and hybrid vector-keyword search, combined with ReAct agents using different prompting strategies. We introduce a comprehensive evaluation framework with novel metrics and provide empirical results comparing different language models (Llama 3.1 and Qwen 2.5) across various retrieval configurations. Our experiments demonstrate significant performance improvements through hybrid search methods and structured self-evaluation prompting, achieving up to 72.7% pass rate on our multi-metric evaluation framework. The results also highlight the importance of prompt engineering in RAG systems, with our custom-prompted agents showing consistent improvements in retrieval accuracy and response quality.
A Multi-Task Text Classification Pipeline with Natural Language Explanations: A User-Centric Evaluation in Sentiment Analysis and Offensive Language Identification in Greek Tweets
Oct 14, 2024



Interpretability is a topic that has been in the spotlight for the past few years. Most existing interpretability techniques produce interpretations in the form of rules or feature importance. These interpretations, while informative, may be harder to understand for non-expert users and therefore, cannot always be considered as adequate explanations. To that end, explanations in natural language are often preferred, as they are easier to comprehend and also more presentable to end-users. This work introduces an early concept for a novel pipeline that can be used in text classification tasks, offering predictions and explanations in natural language. It comprises of two models: a classifier for labelling the text and an explanation generator which provides the explanation. The proposed pipeline can be adopted by any text classification task, given that ground truth rationales are available to train the explanation generator. Our experiments are centred around the tasks of sentiment analysis and offensive language identification in Greek tweets, using a Greek Large Language Model (LLM) to obtain the necessary explanations that can act as rationales. The experimental evaluation was performed through a user study based on three different metrics and achieved promising results for both datasets.
Overcome the Fear Of Missing Out: Active Sensing UAV Scanning for Precision Agriculture
Dec 15, 2023This paper deals with the problem of informative path planning for a UAV deployed for precision agriculture applications. First, we observe that the ``fear of missing out'' data lead to uniform, conservative scanning policies over the whole agricultural field. Consequently, employing a non-uniform scanning approach can mitigate the expenditure of time in areas with minimal or negligible real value, while ensuring heightened precision in information-dense regions. Turning to the available informative path planning methodologies, we discern that certain methods entail intensive computational requirements, while others necessitate training on an ideal world simulator. To address the aforementioned issues, we propose an active sensing coverage path planning approach, named OverFOMO, that regulates the speed of the UAV in accordance with both the relative quantity of the identified classes, i.e. crops and weeds, and the confidence level of such detections. To identify these instances, a robust Deep Learning segmentation model is deployed. The computational needs of the proposed algorithm are independent of the size of the agricultural field, rendering its applicability on modern UAVs quite straightforward. The proposed algorithm was evaluated with a simu-realistic pipeline, combining data from real UAV missions and the high-fidelity dynamics of AirSim simulator, showcasing its performance improvements over the established state of affairs for this type of missions. An open-source implementation of the algorithm and the evaluation pipeline is also available: \url{https://github.com/emmarapt/OverFOMO}.
User Identity Linkage in Social Media Using Linguistic and Social Interaction Features
Aug 22, 2023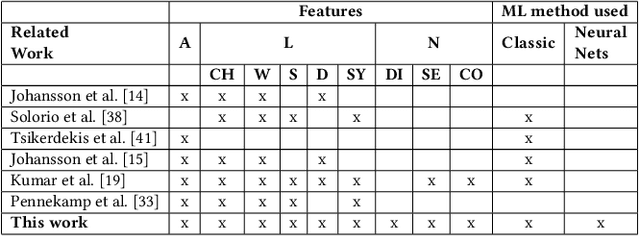
Social media users often hold several accounts in their effort to multiply the spread of their thoughts, ideas, and viewpoints. In the particular case of objectionable content, users tend to create multiple accounts to bypass the combating measures enforced by social media platforms and thus retain their online identity even if some of their accounts are suspended. User identity linkage aims to reveal social media accounts likely to belong to the same natural person so as to prevent the spread of abusive/illegal activities. To this end, this work proposes a machine learning-based detection model, which uses multiple attributes of users' online activity in order to identify whether two or more virtual identities belong to the same real natural person. The models efficacy is demonstrated on two cases on abusive and terrorism-related Twitter content.