 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind2Drive: Predicting Driver Intentions from EEG in Real-world On-Road Driving
Apr 21, 2026Predicting driver intention from neurophysiological signals offers a promising pathway for enhancing proactive safety in advanced driver assistance systems, yet remains challenging in real-world driving due to EEG signal non-stationarity and the complexity of cognitive-motor preparation. This study proposes and evaluates an EEG-based driver intention prediction framework using a synchronised multi-sensor platform integrated into a real electric vehicle. A real-world on-road dataset was collected across 32 driving sessions, and 12 deep learning architectures were evaluated under consistent experimental conditions. Among the evaluated architectures, TSCeption achieved the highest average accuracy (0.907) and Macro-F1 score (0.901). The proposed framework demonstrates strong temporal stability, maintaining robust decoding performance up to 1000 ms before manoeuvre execution with minimal degradation. Furthermore, additional analyses reveal that minimal EEG preprocessing outperforms artefact-handling pipelines, and prediction performance peaks within a 400-600 ms interval, corresponding to a critical neural preparatory phase preceding driving manoeuvres. Overall, these findings support the feasibility of early and stable EEG-based driver intention decoding under real-world on-road conditions. Code: https://github.com/galosaimi/Mind2Drive.
EEG-Driven Intention Decoding: Offline Deep Learning Benchmarking on a Robotic Rover
Feb 23, 2026Brain-computer interfaces (BCIs) provide a hands-free control modality for mobile robotics, yet decoding user intent during real-world navigation remains challenging. This work presents a brain-robot control framework for offline decoding of driving commands during robotic rover operation. A 4WD Rover Pro platform was remotely operated by 12 participants who navigated a predefined route using a joystick, executing the commands forward, reverse, left, right, and stop. Electroencephalogram (EEG) signals were recorded with a 16-channel OpenBCI cap and aligned with motor actions at Delta = 0 ms and future prediction horizons (Delta > 0 ms). After preprocessing, several deep learning models were benchmarked, including convolutional neural networks, recurrent neural networks, and Transformer architectures. ShallowConvNet achieved the highest performance for both action prediction and intent prediction. By combining real-world robotic control with multi-horizon EEG intention decoding, this study introduces a reproducible benchmark and reveals key design insights for predictive deep learning-based BCI systems.
SKDU at De-Factify 4.0: Natural Language Features for AI-Generated Text-Detection
Mar 28, 2025



The rapid advancement of large language models (LLMs) has introduced new challenges in distinguishing human-written text from AI-generated content. In this work, we explored a pipelined approach for AI-generated text detection that includes a feature extraction step (i.e. prompt-based rewriting features inspired by RAIDAR and content-based features derived from the NELA toolkit) followed by a classification module. Comprehensive experiments were conducted on the Defactify4.0 dataset, evaluating two tasks: binary classification to differentiate human-written and AI-generated text, and multi-class classification to identify the specific generative model used to generate the input text. Our findings reveal that NELA features significantly outperform RAIDAR features in both tasks, demonstrating their ability to capture nuanced linguistic, stylistic, and content-based differences. Combining RAIDAR and NELA features provided minimal improvement, highlighting the redundancy introduced by less discriminative features. Among the classifiers tested, XGBoost emerged as the most effective, leveraging the rich feature sets to achieve high accuracy and generalisation.
SKDU at De-Factify 4.0: Vision Transformer with Data Augmentation for AI-Generated Image Detection
Mar 24, 2025The aim of this work is to explore the potential of pre-trained vision-language models, e.g. Vision Transformers (ViT), enhanced with advanced data augmentation strategies for the detection of AI-generated images. Our approach leverages a fine-tuned ViT model trained on the Defactify-4.0 dataset, which includes images generated by state-of-the-art models such as Stable Diffusion 2.1, Stable Diffusion XL, Stable Diffusion 3, DALL-E 3, and MidJourney. We employ perturbation techniques like flipping, rotation, Gaussian noise injection, and JPEG compression during training to improve model robustness and generalisation. The experimental results demonstrate that our ViT-based pipeline achieves state-of-the-art performance, significantly outperforming competing methods on both validation and test datasets.
BP-SGCN: Behavioral Pseudo-Label Informed Sparse Graph Convolution Network for Pedestrian and Heterogeneous Trajectory Prediction
Feb 21, 2025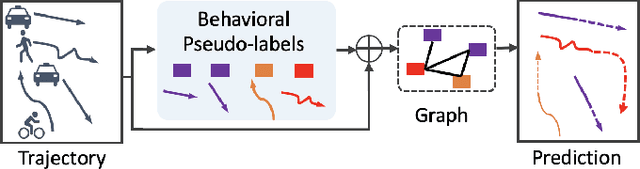
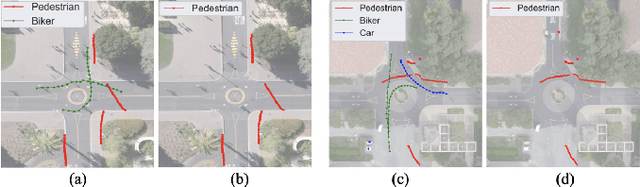
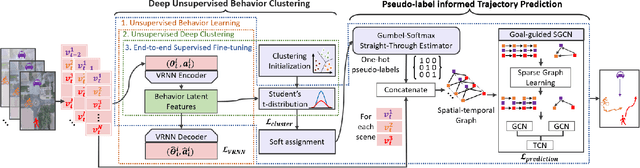
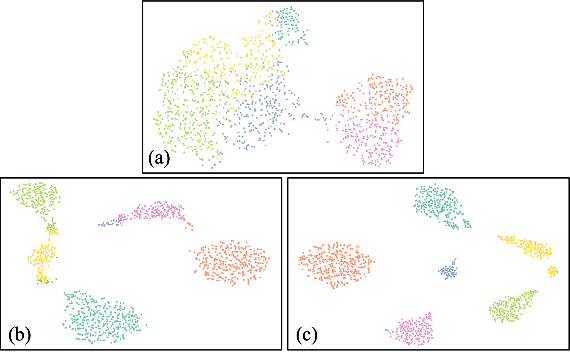
Trajectory prediction allows better decision-making in applications of autonomous vehicles or surveillance by predicting the short-term future movement of traffic agents. It is classified into pedestrian or heterogeneous trajectory prediction. The former exploits the relatively consistent behavior of pedestrians, but is limited in real-world scenarios with heterogeneous traffic agents such as cyclists and vehicles. The latter typically relies on extra class label information to distinguish the heterogeneous agents, but such labels are costly to annotate and cannot be generalized to represent different behaviors within the same class of agents. In this work, we introduce the behavioral pseudo-labels that effectively capture the behavior distributions of pedestrians and heterogeneous agents solely based on their motion features, significantly improving the accuracy of trajectory prediction. To implement the framework, we propose the Behavioral Pseudo-Label Informed Sparse Graph Convolution Network (BP-SGCN) that learns pseudo-labels and informs to a trajectory predictor. For optimization, we propose a cascaded training scheme, in which we first learn the pseudo-labels in an unsupervised manner, and then perform end-to-end fine-tuning on the labels in the direction of increasing the trajectory prediction accuracy. Experiments show that our pseudo-labels effectively model different behavior clusters and improve trajectory prediction. Our proposed BP-SGCN outperforms existing methods using both pedestrian (ETH/UCY, pedestrian-only SDD) and heterogeneous agent datasets (SDD, Argoverse 1).
Unified Spatial-Temporal Edge-Enhanced Graph Networks for Pedestrian Trajectory Prediction
Feb 04, 2025Pedestrian trajectory prediction aims to forecast future movements based on historical paths. Spatial-temporal (ST) methods often separately model spatial interactions among pedestrians and temporal dependencies of individuals. They overlook the direct impacts of interactions among different pedestrians across various time steps (i.e., high-order cross-time interactions). This limits their ability to capture ST inter-dependencies and hinders prediction performance. To address these limitations, we propose UniEdge with three major designs. Firstly, we introduce a unified ST graph data structure that simplifies high-order cross-time interactions into first-order relationships, enabling the learning of ST inter-dependencies in a single step. This avoids the information loss caused by multi-step aggregation. Secondly, traditional GNNs focus on aggregating pedestrian node features, neglecting the propagation of implicit interaction patterns encoded in edge features. We propose the Edge-to-Edge-Node-to-Node Graph Convolution (E2E-N2N-GCN), a novel dual-graph network that jointly models explicit N2N social interactions among pedestrians and implicit E2E influence propagation across these interaction patterns. Finally, to overcome the limited receptive fields and challenges in capturing long-range dependencies of auto-regressive architectures, we introduce a transformer encoder-based predictor that enables global modeling of temporal correlation. UniEdge outperforms state-of-the-arts on multiple datasets, including ETH, UCY, and SDD.
On Bias and Fairness in NLP: How to have a fairer text classification?
May 22, 2023In this paper, we provide a holistic analysis of the different sources of bias, Upstream, Sample and Overampflication biases, in NLP models. We investigate how they impact the fairness of the task of text classification. We also investigate the impact of removing these biases using different debiasing techniques on the fairness of text classification. We found that overamplification bias is the most impactful bias on the fairness of text classification. And that removing overamplification bias by fine-tuning the LM models on a dataset with balanced representations of the different identity groups leads to fairer text classification models. Finally, we build on our findings and introduce practical guidelines on how to have a fairer text classification model.
Multiclass-SGCN: Sparse Graph-based Trajectory Prediction with Agent Class Embedding
Jun 30, 2022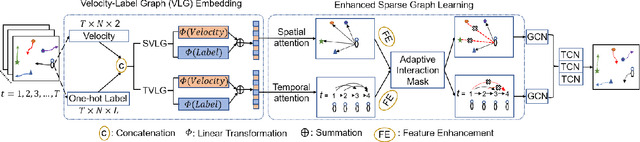

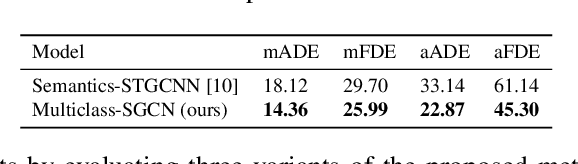
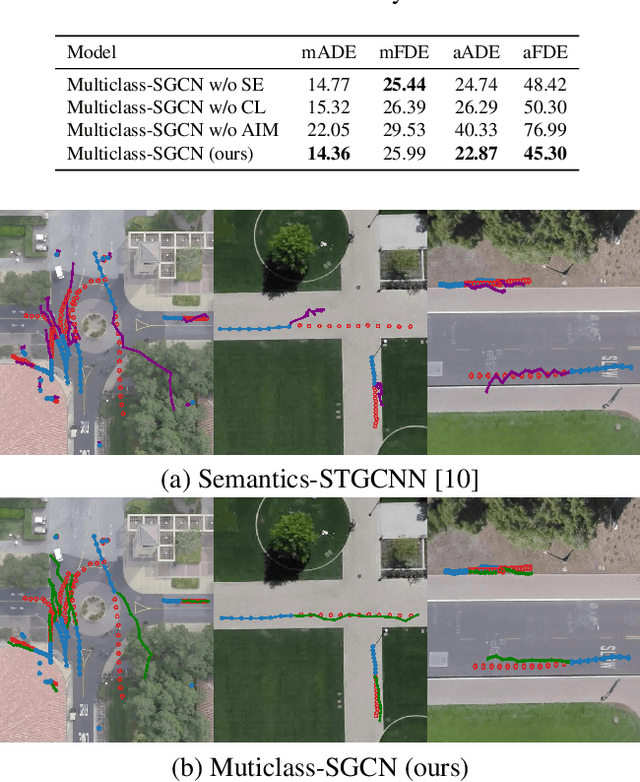
Trajectory prediction of road users in real-world scenarios is challenging because their movement patterns are stochastic and complex. Previous pedestrian-oriented works have been successful in modelling the complex interactions among pedestrians, but fail in predicting trajectories when other types of road users are involved (e.g., cars, cyclists, etc.), because they ignore user types. Although a few recent works construct densely connected graphs with user label information, they suffer from superfluous spatial interactions and temporal dependencies. To address these issues, we propose Multiclass-SGCN, a sparse graph convolution network based approach for multi-class trajectory prediction that takes into consideration velocity and agent label information and uses a novel interaction mask to adaptively decide the spatial and temporal connections of agents based on their interaction scores. The proposed approach significantly outperformed state-of-the-art approaches on the Stanford Drone Dataset, providing more realistic and plausible trajectory predictions.