 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Real-time Intrahepatic Vessel Identification in Intraoperative Ultrasound-Guided Liver Surgery
Oct 04, 2024While laparoscopic liver resection is less prone to complications and maintains patient outcomes compared to traditional open surgery, its complexity hinders widespread adoption due to challenges in representing the liver's internal structure. Laparoscopic intraoperative ultrasound offers efficient, cost-effective and radiation-free guidance. Our objective is to aid physicians in identifying internal liver structures using laparoscopic intraoperative ultrasound. We propose a patient-specific approach using preoperative 3D ultrasound liver volume to train a deep learning model for real-time identification of portal tree and branch structures. Our personalized AI model, validated on ex vivo swine livers, achieved superior precision (0.95) and recall (0.93) compared to surgeons, laying groundwork for precise vessel identification in ultrasound-based liver resection. Its adaptability and potential clinical impact promise to advance surgical interventions and improve patient care.
A Zero-Shot Reinforcement Learning Strategy for Autonomous Guidewire Navigation
Mar 05, 2024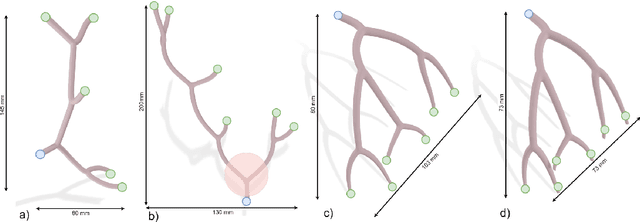

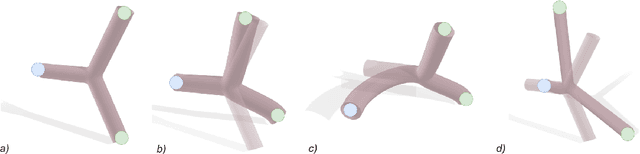

Purpose: The treatment of cardiovascular diseases requires complex and challenging navigation of a guidewire and catheter. This often leads to lengthy interventions during which the patient and clinician are exposed to X-ray radiation. Deep Reinforcement Learning approaches have shown promise in learning this task and may be the key to automating catheter navigation during robotized interventions. Yet, existing training methods show limited capabilities at generalizing to unseen vascular anatomies, requiring to be retrained each time the geometry changes. Methods: In this paper, we propose a zero-shot learning strategy for three-dimensional autonomous endovascular navigation. Using a very small training set of branching patterns, our reinforcement learning algorithm is able to learn a control that can then be applied to unseen vascular anatomies without retraining. Results: We demonstrate our method on 4 different vascular systems, with an average success rate of 95% at reaching random targets on these anatomies. Our strategy is also computationally efficient, allowing the training of our controller to be performed in only 2 hours. Conclusion: Our training method proved its ability to navigate unseen geometries with different characteristics, thanks to a nearly shape-invariant observation space.
Deformable Image Registration with Stochastically Regularized Biomechanical Equilibrium
Dec 22, 2023



Numerous regularization methods for deformable image registration aim at enforcing smooth transformations, but are difficult to tune-in a priori and lack a clear physical basis. Physically inspired strategies have emerged, offering a sound theoretical basis, but still necessitating complex discretization and resolution schemes. This study introduces a regularization strategy that does not require discretization, making it compatible with current registration frameworks, while retaining the benefits of physically motivated regularization for medical image registration. The proposed method performs favorably in both synthetic and real datasets, exhibiting an accuracy comparable to current state-of-the-art methods.
Real-time elastic partial shape matching using a neural network-based adjoint method
Mar 16, 2023Surface matching usually provides significant deformations that can lead to structural failure due to the lack of physical policy. In this context, partial surface matching of non-linear deformable bodies is crucial in engineering to govern structure deformations. In this article, we propose to formulate the registration problem as an optimal control problem using an artificial neural network where the unknown is the surface force distribution that applies to the object and the resulting deformation computed using a hyper-elastic model. The optimization problem is solved using an adjoint method where the hyper-elastic problem is solved using the feed-forward neural network and the adjoint problem is obtained through the backpropagation of the network. Our process improves the computation speed by multiple orders of magnitude while providing acceptable registration errors.
CNN-based real-time 2D-3D deformable registration from a single X-ray projection
Dec 15, 2022Purpose: The purpose of this paper is to present a method for real-time 2D-3D non-rigid registration using a single fluoroscopic image. Such a method can find applications in surgery, interventional radiology and radiotherapy. By estimating a three-dimensional displacement field from a 2D X-ray image, anatomical structures segmented in the preoperative scan can be projected onto the 2D image, thus providing a mixed reality view. Methods: A dataset composed of displacement fields and 2D projections of the anatomy is generated from the preoperative scan. From this dataset, a neural network is trained to recover the unknown 3D displacement field from a single projection image. Results: Our method is validated on lung 4D CT data at different stages of the lung deformation. The training is performed on a 3D CT using random (non domain-specific) diffeomorphic deformations, to which perturbations mimicking the pose uncertainty are added. The model achieves a mean TRE over a series of landmarks ranging from 2.3 to 5.5 mm depending on the amplitude of deformation. Conclusion: In this paper, a CNN-based method for real-time 2D-3D non-rigid registration is presented. This method is able to cope with pose estimation uncertainties, making it applicable to actual clinical scenarios, such as lung surgery, where the C-arm pose is planned before the intervention.
DeepPhysics: a physics aware deep learning framework for real-time simulation
Sep 17, 2021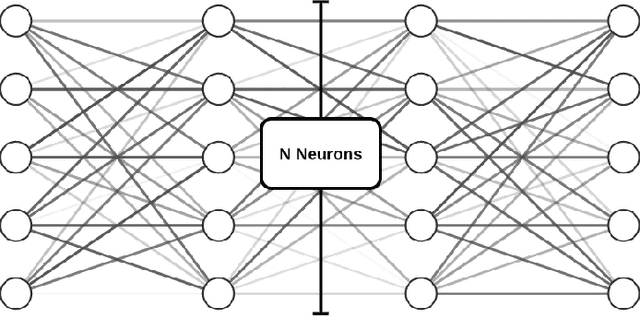

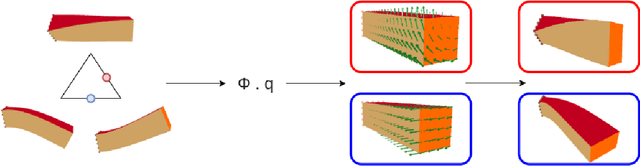
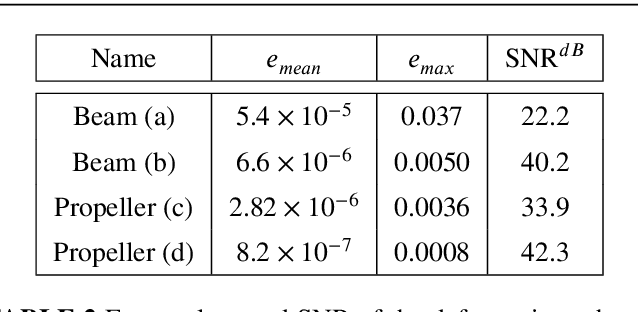
Real-time simulation of elastic structures is essential in many applications, from computer-guided surgical interventions to interactive design in mechanical engineering. The Finite Element Method is often used as the numerical method of reference for solving the partial differential equations associated with these problems. Yet, deep learning methods have recently shown that they could represent an alternative strategy to solve physics-based problems 1,2,3. In this paper, we propose a solution to simulate hyper-elastic materials using a data-driven approach, where a neural network is trained to learn the non-linear relationship between boundary conditions and the resulting displacement field. We also introduce a method to guarantee the validity of the solution. In total, we present three contributions: an optimized data set generation algorithm based on modal analysis, a physics-informed loss function, and a Hybrid Newton-Raphson algorithm. The method is applied to two benchmarks: a cantilever beam and a propeller. The results show that our network architecture trained with a limited amount of data can predict the displacement field in less than a millisecond. The predictions on various geometries, topologies, mesh resolutions, and boundary conditions are accurate to a few micrometers for non-linear deformations of several centimeters of amplitude.
Elastic registration based on compliance analysis and biomechanical graph matching
Dec 13, 2019

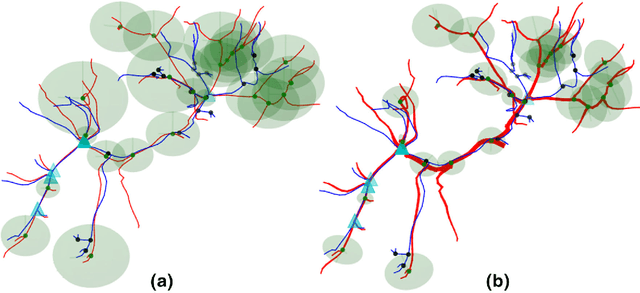

An automatic elastic registration method suited for vascularized organs is proposed. The vasculature in both the preoperative and intra-operative images is represented as a graph. A typical application of this method is the fusion of pre-operative information onto the organ during surgery, to compensate for the limited details provided by the intra-operative imaging modality (e.g. CBCT) and to cope with changes in the shape of the organ. Due to image modalities differences and organ deformation, each graph has a different topology and shape. The Adaptive Compliance Graph Matching (ACGM) method presented does not require any manual initialization, handles intra-operative nonrigid deformations of up to 65 mm and computes a complete displacement field over the organ from only the matched vasculature. ACGM is better than the previous Biomechanical Graph Matching method 3 (BGM) because it uses an efficient biomechanical vascularized liver model to compute the organ's transformation and the vessels bifurcations compliance. This allows to efficiently find the best graph matches with a novel compliance-based adaptive search. These contributions are evaluated on ten realistic synthetic and two real porcine automatically segmented datasets. ACGM obtains better target registration error (TRE) than BGM, with an average TRE in the real datasets of 4.2 mm compared to 6.5 mm, respectively. It also is up to one order of magnitude faster, less dependent on the parameters used and more robust to noise.
Simulation of hyperelastic materials in real-time using Deep Learning
Apr 10, 2019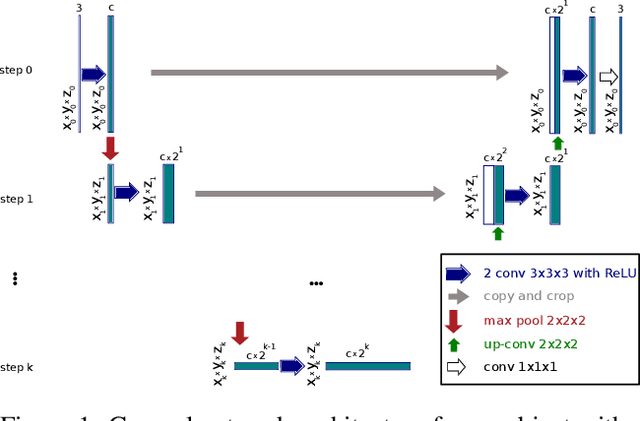
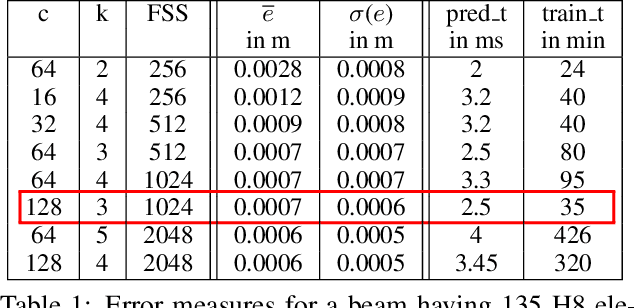
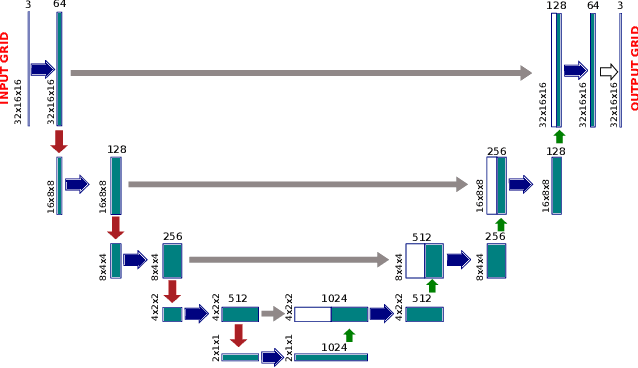

The finite element method (FEM) is among the most commonly used numerical methods for solving engineering problems. Due to its computational cost, various ideas have been introduced to reduce computation times, such as domain decomposition, parallel computing, adaptive meshing, and model order reduction. In this paper we present U-Mesh: a data-driven method based on a U-Net architecture that approximates the non-linear relation between a contact force and the displacement field computed by a FEM algorithm. We show that deep learning, one of the latest machine learning methods based on artificial neural networks, can enhance computational mechanics through its ability to encode highly non-linear models in a compact form. Our method is applied to two benchmark examples: a cantilever beam and an L-shape subject to moving punctual loads. A comparison between our method and proper orthogonal decomposition (POD) is done through the paper. The results show that U-Mesh can perform very fast simulations on various geometries, mesh resolutions and number of input forces with very small errors.