 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Large Language Model-Powered Spatial Intelligence Across Scales: Advances in Embodied Agents, Smart Cities, and Earth Science
Apr 14, 2025Over the past year, the development of large language models (LLMs) has brought spatial intelligence into focus, with much attention on vision-based embodied intelligence. However, spatial intelligence spans a broader range of disciplines and scales, from navigation and urban planning to remote sensing and earth science. What are the differences and connections between spatial intelligence across these fields? In this paper, we first review human spatial cognition and its implications for spatial intelligence in LLMs. We then examine spatial memory, knowledge representations, and abstract reasoning in LLMs, highlighting their roles and connections. Finally, we analyze spatial intelligence across scales -- from embodied to urban and global levels -- following a framework that progresses from spatial memory and understanding to spatial reasoning and intelligence. Through this survey, we aim to provide insights into interdisciplinary spatial intelligence research and inspire future studies.
LIMP: Large Language Model Enhanced Intent-aware Mobility Prediction
Aug 23, 2024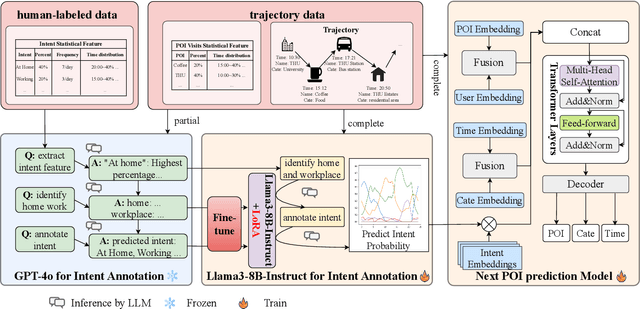
Human mobility prediction is essential for applications like urban planning and transportation management, yet it remains challenging due to the complex, often implicit, intentions behind human behavior. Existing models predominantly focus on spatiotemporal patterns, paying less attention to the underlying intentions that govern movements. Recent advancements in large language models (LLMs) offer a promising alternative research angle for integrating commonsense reasoning into mobility prediction. However, it is a non-trivial problem because LLMs are not natively built for mobility intention inference, and they also face scalability issues and integration difficulties with spatiotemporal models. To address these challenges, we propose a novel LIMP (LLMs for Intent-ware Mobility Prediction) framework. Specifically, LIMP introduces an "Analyze-Abstract-Infer" (A2I) agentic workflow to unleash LLM's commonsense reasoning power for mobility intention inference. Besides, we design an efficient fine-tuning scheme to transfer reasoning power from commercial LLM to smaller-scale, open-source language model, ensuring LIMP's scalability to millions of mobility records. Moreover, we propose a transformer-based intention-aware mobility prediction model to effectively harness the intention inference ability of LLM. Evaluated on two real-world datasets, LIMP significantly outperforms baseline models, demonstrating improved accuracy in next-location prediction and effective intention inference. The interpretability of intention-aware mobility prediction highlights our LIMP framework's potential for real-world applications. Codes and data can be found in https://github.com/tsinghua-fib-lab/LIMP .