 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMore Than Can Be Said: A Benchmark and Framework for Pre-Question Scientific Ideation
May 07, 2026AI research agents have shown strong potential in automating literature search and manuscript refinement, yet most assume a clear and actionable initial input, operating only after a research question has been made explicit. In contrast, human research often begins with tacit friction, a sense of misalignment before a question can be formed. We introduce InciteResearch, a multi-agent framework designed to make a researcher's implicit understanding explicit, inspectable, and actionable. InciteResearch decomposes the logical chain of Socratic questioning and distributes it across the entire pipeline that: (1) Elicits a structured five-dimensional researcher profile state anchored by specific friction points from vague, even domain-unrelated inputs; (2) Violates hidden assumptions by maximizing the feasibility-novelty product with enforcing a 7-stage causal derivation trace; and (3) check whether the proposed method is a Necessary consequence of the reframed insight. We further introduce TF-Bench, the first benchmark for tacit-to-explicit research assistance that distinguishes domain-related from domain-unrelated inspirations across four scientific modes. On TF-Bench, InciteResearch achieves leapfrogging gains over a prompt-based baseline (novelty/impact from 3.671/3.806 to 4.250/4.397), shifting generated proposals from recombination to architectural insight. Our work demonstrates that AI can serve as an extension of thinking itself, rather than merely automating downstream execution.
A Mechanism and Optimization Study on the Impact of Information Density on User-Generated Content Named Entity Recognition
Apr 21, 2026Named Entity Recognition (NER) models trained on clean, high-resource corpora exhibit catastrophic performance collapse when deployed on noisy, sparse User-Generated Content (UGC), such as social media. Prior research has predominantly focused on point-wise symptom remediation -- employing customized fine-tuning to address issues like neologisms, alias drift, non-standard orthography, long-tail entities, and class imbalance. However, these improvements often fail to generalize because they overlook the structural sparsity inherent in UGC. This study reveals that surface-level noise symptoms share a unified root cause: low Information Density (ID). Through hierarchical confounding-controlled resampling experiments (specifically controlling for entity rarity and annotation consistency), this paper identifies ID as an independent key factor. We introduce Attention Spectrum Analysis (ASA) to quantify how reduced ID causally leads to ``attention blunting,'' ultimately degrading NER performance. Informed by these mechanistic insights, we propose the Window-Aware Optimization Module (WOM), an LLM-empowered, model-agnostic framework. WOM identifies information-sparse regions and utilizes selective back-translation to directionally enhance semantic density without altering model architecture. Deployed atop mainstream architectures on standard UGC datasets (WNUT2017, Twitter-NER, WNUT2016), WOM yields up to 4.5\% absolute F1 improvement, demonstrating robustness and achieving new state-of-the-art (SOTA) results on WNUT2017.
ReBeCA: Unveiling Interpretable Behavior Hierarchy behind the Iterative Self-Reflection of Language Models with Causal Analysis
Feb 06, 2026While self-reflection can enhance language model reliability, its underlying mechanisms remain opaque, with existing analyses often yielding correlation-based insights that fail to generalize. To address this, we introduce \textbf{\texttt{ReBeCA}} (self-\textbf{\texttt{Re}}flection \textbf{\texttt{Be}}havior explained through \textbf{\texttt{C}}ausal \textbf{\texttt{A}}nalysis), a framework that unveils the interpretable behavioral hierarchy governing the self-reflection outcome. By modeling self-reflection trajectories as causal graphs, ReBeCA isolates genuine determinants of performance through a three-stage Invariant Causal Prediction (ICP) pipeline. We establish three critical findings: (1) \textbf{Behavioral hierarchy:} Semantic behaviors of the model influence final self-reflection results hierarchically: directly or indirectly; (2) \textbf{Causation matters:} Generalizability in self-reflection effects is limited to just a few semantic behaviors; (3) \textbf{More $\mathbf{\neq}$ better:} The confluence of seemingly positive semantic behaviors, even among direct causal factors, can impair the efficacy of self-reflection. ICP-based verification identifies sparse causal parents achieving up to $49.6\%$ structural likelihood gains, stable across tasks where correlation-based patterns fail. Intervention studies on novel datasets confirm these causal relationships hold out-of-distribution ($p = .013, η^2_\mathrm{p} = .071$). ReBeCA thus provides a rigorous methodology for disentangling genuine causal mechanisms from spurious associations in self-reflection dynamics.
DSAM-GN:Graph Network based on Dynamic Similarity Adjacency Matrices for Vehicle Re-identification
Oct 25, 2023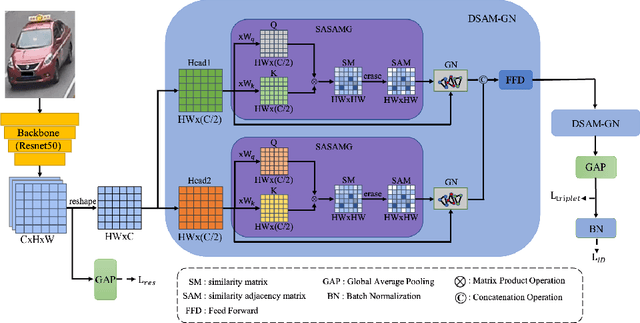
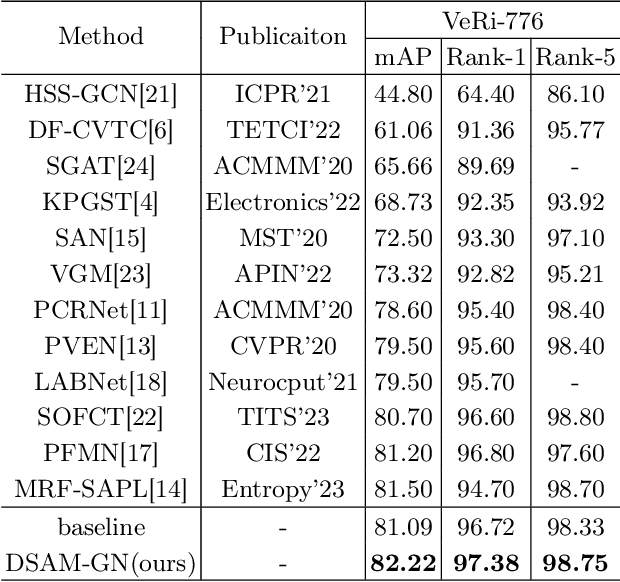
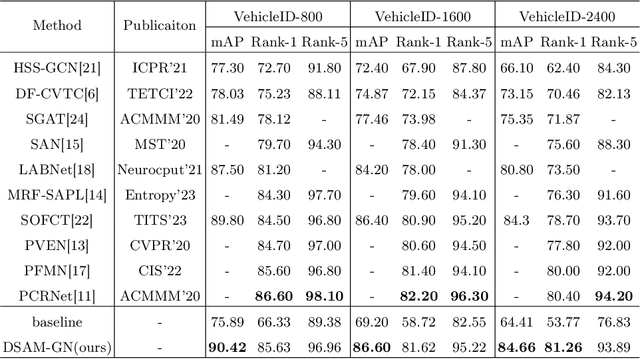
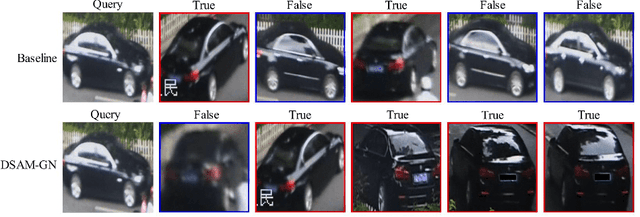
In recent years, vehicle re-identification (Re-ID) has gained increasing importance in various applications such as assisted driving systems, traffic flow management, and vehicle tracking, due to the growth of intelligent transportation systems. However, the presence of extraneous background information and occlusions can interfere with the learning of discriminative features, leading to significant variations in the same vehicle image across different scenarios. This paper proposes a method, named graph network based on dynamic similarity adjacency matrices (DSAM-GN), which incorporates a novel approach for constructing adjacency matrices to capture spatial relationships of local features and reduce background noise. Specifically, the proposed method divides the extracted vehicle features into different patches as nodes within the graph network. A spatial attention-based similarity adjacency matrix generation (SASAMG) module is employed to compute similarity matrices of nodes, and a dynamic erasure operation is applied to disconnect nodes with low similarity, resulting in similarity adjacency matrices. Finally, the nodes and similarity adjacency matrices are fed into graph networks to extract more discriminative features for vehicle Re-ID. Experimental results on public datasets VeRi-776 and VehicleID demonstrate the effectiveness of the proposed method compared with recent works.