 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSAM-GN:Graph Network based on Dynamic Similarity Adjacency Matrices for Vehicle Re-identification
Oct 25, 2023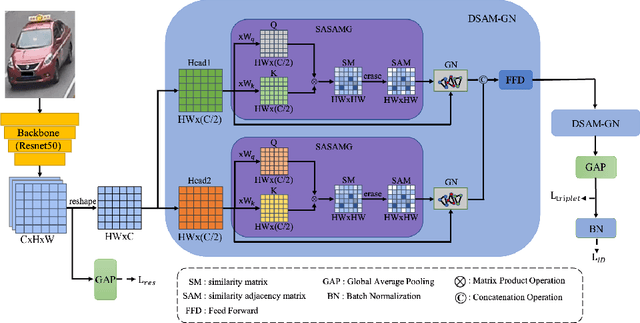
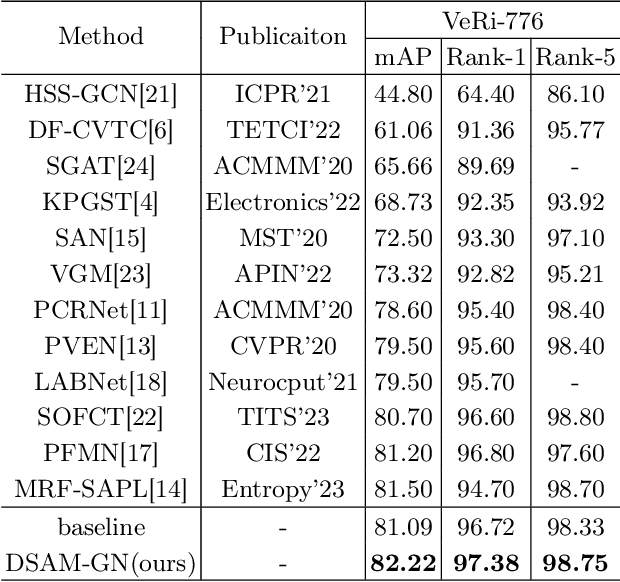
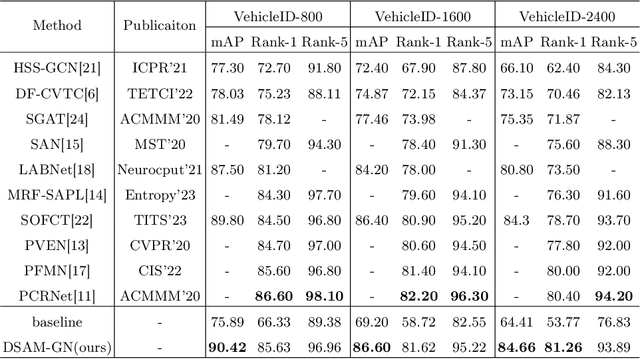
In recent years, vehicle re-identification (Re-ID) has gained increasing importance in various applications such as assisted driving systems, traffic flow management, and vehicle tracking, due to the growth of intelligent transportation systems. However, the presence of extraneous background information and occlusions can interfere with the learning of discriminative features, leading to significant variations in the same vehicle image across different scenarios. This paper proposes a method, named graph network based on dynamic similarity adjacency matrices (DSAM-GN), which incorporates a novel approach for constructing adjacency matrices to capture spatial relationships of local features and reduce background noise. Specifically, the proposed method divides the extracted vehicle features into different patches as nodes within the graph network. A spatial attention-based similarity adjacency matrix generation (SASAMG) module is employed to compute similarity matrices of nodes, and a dynamic erasure operation is applied to disconnect nodes with low similarity, resulting in similarity adjacency matrices. Finally, the nodes and similarity adjacency matrices are fed into graph networks to extract more discriminative features for vehicle Re-ID. Experimental results on public datasets VeRi-776 and VehicleID demonstrate the effectiveness of the proposed method compared with recent works.