 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLight-weighted CNN-Attention based architecture for Hand Gesture Recognition via ElectroMyography
Oct 27, 2022Advancements in Biological Signal Processing (BSP) and Machine-Learning (ML) models have paved the path for development of novel immersive Human-Machine Interfaces (HMI). In this context, there has been a surge of significant interest in Hand Gesture Recognition (HGR) utilizing Surface-Electromyogram (sEMG) signals. This is due to its unique potential for decoding wearable data to interpret human intent for immersion in Mixed Reality (MR) environments. To achieve the highest possible accuracy, complicated and heavy-weighted Deep Neural Networks (DNNs) are typically developed, which restricts their practical application in low-power and resource-constrained wearable systems. In this work, we propose a light-weighted hybrid architecture (HDCAM) based on Convolutional Neural Network (CNN) and attention mechanism to effectively extract local and global representations of the input. The proposed HDCAM model with 58,441 parameters reached a new state-of-the-art (SOTA) performance with 82.91% and 81.28% accuracy on window sizes of 300 ms and 200 ms for classifying 17 hand gestures. The number of parameters to train the proposed HDCAM architecture is 18.87 times less than its previous SOTA counterpart.
TraHGR: Transformer for Hand Gesture Recognition via ElectroMyography
Mar 31, 2022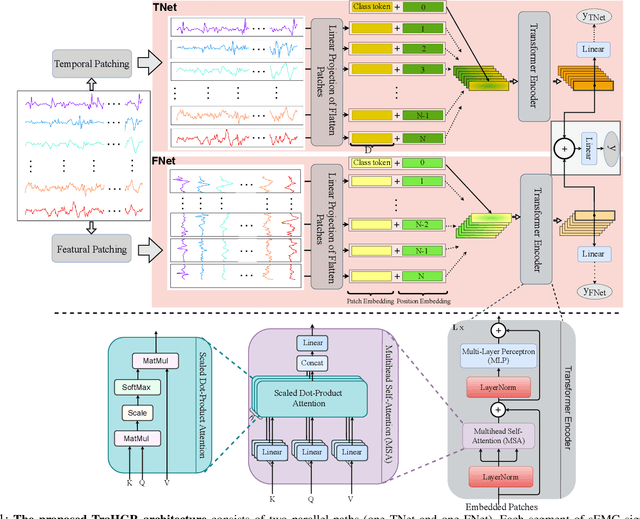
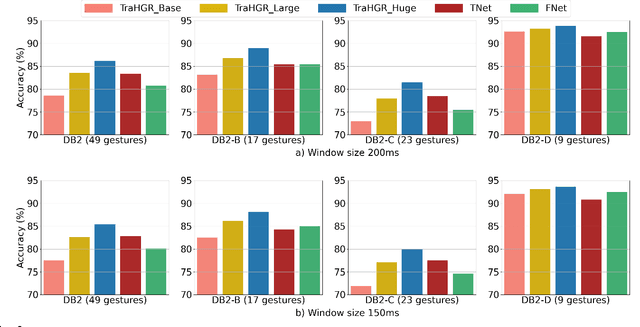
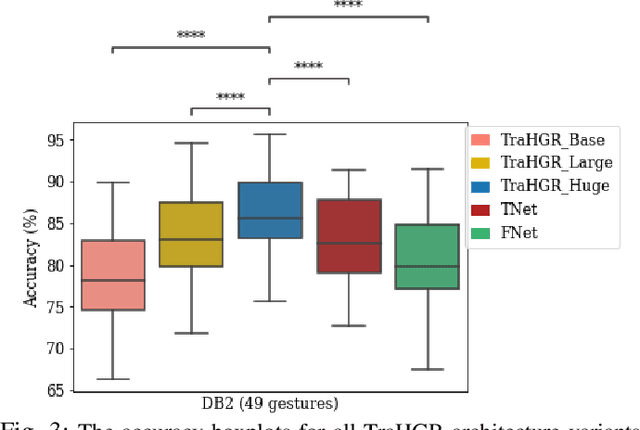
Deep learning-based Hand Gesture Recognition (HGR) via surface Electromyogram (sEMG) signals has recently shown significant potential for development of advanced myoelectric-controlled prosthesis. Existing deep learning approaches, typically, include only one model as such can hardly maintain acceptable generalization performance in changing scenarios. In this paper, we aim to address this challenge by capitalizing on the recent advances of hybrid models and transformers. In other words, we propose a hybrid framework based on the transformer architecture, which is a relatively new and revolutionizing deep learning model. The proposed hybrid architecture, referred to as the Transformer for Hand Gesture Recognition (TraHGR), consists of two parallel paths followed by a linear layer that acts as a fusion center to integrate the advantage of each module and provide robustness over different scenarios. We evaluated the proposed architecture TraHGR based on the commonly used second Ninapro dataset, referred to as the DB2. The sEMG signals in the DB2 dataset are measured in the real-life conditions from 40 healthy users, each performing 49 gestures. We have conducted extensive set of experiments to test and validate the proposed TraHGR architecture, and have compared its achievable accuracy with more than five recently proposed HGR classification algorithms over the same dataset. We have also compared the results of the proposed TraHGR architecture with each individual path and demonstrated the distinguishing power of the proposed hybrid architecture. The recognition accuracies of the proposed TraHGR architecture are 86.18%, 88.91%, 81.44%, and 93.84%, which are 2.48%, 5.12%, 8.82%, and 4.30% higher than the state-ofthe-art performance for DB2 (49 gestures), DB2-B (17 gestures), DB2-C (23 gestures), and DB2-D (9 gestures), respectively.
ViT-HGR: Vision Transformer-based Hand Gesture Recognition from High Density Surface EMG Signals
Jan 25, 2022



Recently, there has been a surge of significant interest on application of Deep Learning (DL) models to autonomously perform hand gesture recognition using surface Electromyogram (sEMG) signals. DL models are, however, mainly designed to be applied on sparse sEMG signals. Furthermore, due to their complex structure, typically, we are faced with memory constraints; require large training times and a large number of training samples, and; there is the need to resort to data augmentation and/or transfer learning. In this paper, for the first time (to the best of our knowledge), we investigate and design a Vision Transformer (ViT) based architecture to perform hand gesture recognition from High Density (HD-sEMG) signals. Intuitively speaking, we capitalize on the recent breakthrough role of the transformer architecture in tackling different complex problems together with its potential for employing more input parallelization via its attention mechanism. The proposed Vision Transformer-based Hand Gesture Recognition (ViT-HGR) framework can overcome the aforementioned training time problems and can accurately classify a large number of hand gestures from scratch without any need for data augmentation and/or transfer learning. The efficiency of the proposed ViT-HGR framework is evaluated using a recently-released HD-sEMG dataset consisting of 65 isometric hand gestures. Our experiments with 64-sample (31.25 ms) window size yield average test accuracy of 84.62 +/- 3.07%, where only 78, 210 number of parameters is utilized. The compact structure of the proposed ViT-based ViT-HGR framework (i.e., having significantly reduced number of trainable parameters) shows great potentials for its practical application for prosthetic control.
BP-Net: Cuff-less, Calibration-free, and Non-invasive Blood Pressure Estimation via a Generic Deep Convolutional Architecture
Dec 31, 2021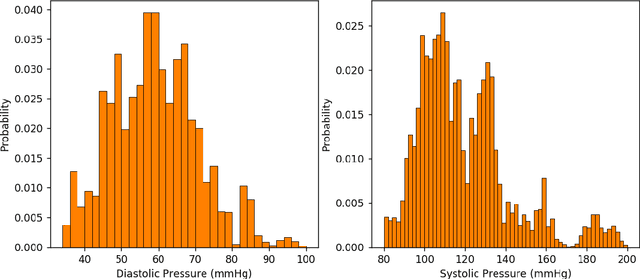
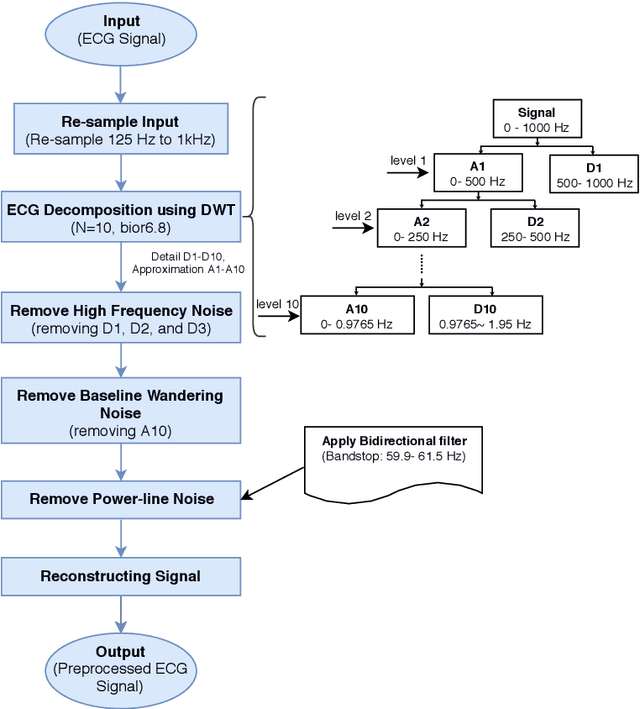
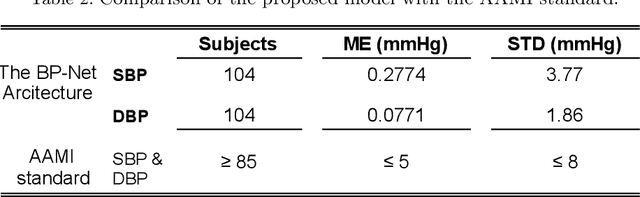
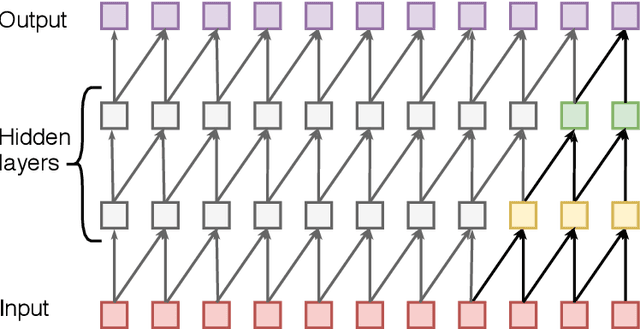
Objective: The paper focuses on development of robust and accurate processing solutions for continuous and cuff-less blood pressure (BP) monitoring. In this regard, a robust deep learning-based framework is proposed for computation of low latency, continuous, and calibration-free upper and lower bounds on the systolic and diastolic BP. Method: Referred to as the BP-Net, the proposed framework is a novel convolutional architecture that provides longer effective memory while achieving superior performance due to incorporation of casual dialated convolutions and residual connections. To utilize the real potential of deep learning in extraction of intrinsic features (deep features) and enhance the long-term robustness, the BP-Net uses raw Electrocardiograph (ECG) and Photoplethysmograph (PPG) signals without extraction of any form of hand-crafted features as it is common in existing solutions. Results: By capitalizing on the fact that datasets used in recent literature are not unified and properly defined, a benchmark dataset is constructed from the MIMIC-I and MIMIC-III databases obtained from PhysioNet. The proposed BP-Net is evaluated based on this benchmark dataset demonstrating promising performance and shows superior generalizable capacity. Conclusion: The proposed BP-Net architecture is more accurate than canonical recurrent networks and enhances the long-term robustness of the BP estimation task. Significance: The proposed BP-Net architecture addresses key drawbacks of existing BP estimation solutions, i.e., relying heavily on extraction of hand-crafted features, such as pulse arrival time (PAT), and; Lack of robustness. Finally, the constructed BP-Net dataset provides a unified base for evaluation and comparison of deep learning-based BP estimation algorithms.
Hand Gesture Recognition Using Temporal Convolutions and Attention Mechanism
Oct 17, 2021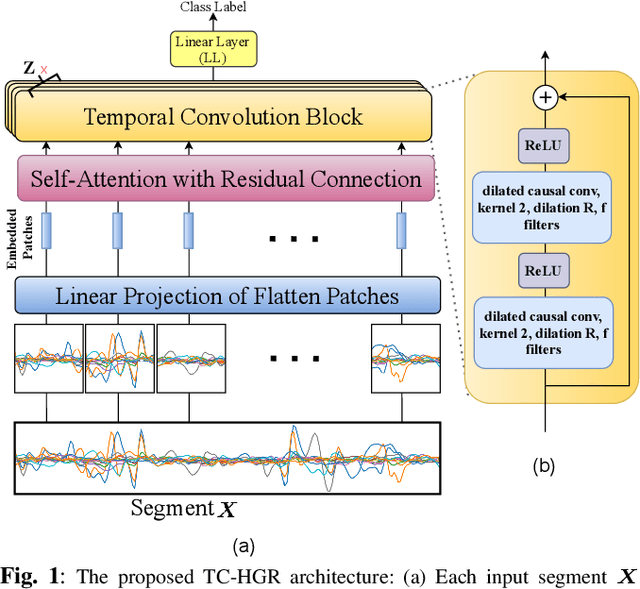
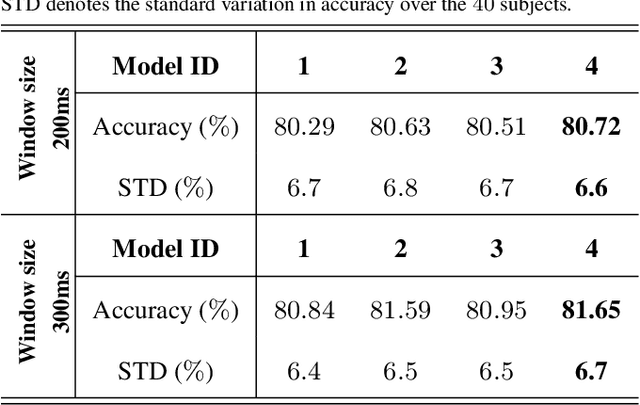
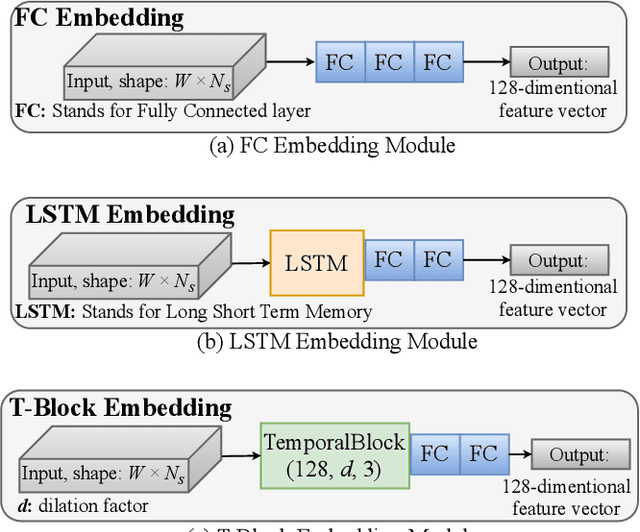
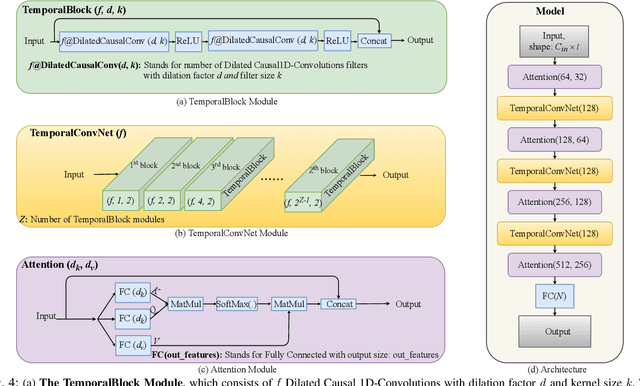
Advances in biosignal signal processing and machine learning, in particular Deep Neural Networks (DNNs), have paved the way for the development of innovative Human-Machine Interfaces for decoding the human intent and controlling artificial limbs. DNN models have shown promising results with respect to other algorithms for decoding muscle electrical activity, especially for recognition of hand gestures. Such data-driven models, however, have been challenged by their need for a large number of trainable parameters and their structural complexity. Here we propose the novel Temporal Convolutions-based Hand Gesture Recognition architecture (TC-HGR) to reduce this computational burden. With this approach, we classified 17 hand gestures via surface Electromyogram (sEMG) signals by the adoption of attention mechanisms and temporal convolutions. The proposed method led to 81.65% and 80.72% classification accuracy for window sizes of 300ms and 200ms, respectively. The number of parameters to train the proposed TC-HGR architecture is 11.9 times less than that of its state-of-the-art counterpart.
Q-Net: A Quantitative Susceptibility Mapping-based Deep Neural Network for Differential Diagnosis of Brain Iron Deposition in Hemochromatosis
Oct 01, 2021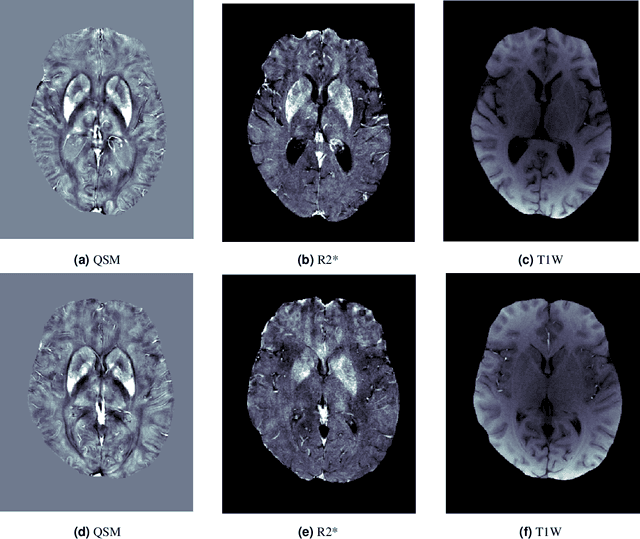

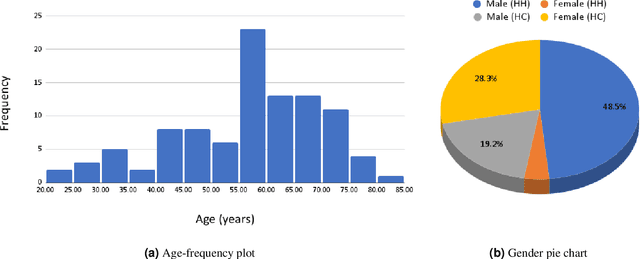
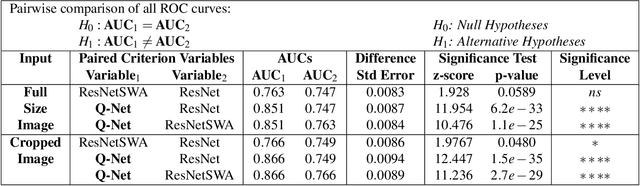
Brain iron deposition, in particular deep gray matter nuclei, increases with advancing age. Hereditary Hemochromatosis (HH) is the most common inherited disorder of systemic iron excess in Europeans and recent studies claimed high brain iron accumulation in patient with Hemochromatosis. In this study, we focus on Artificial Intelligence (AI)-based differential diagnosis of brain iron deposition in HH via Quantitative Susceptibility Mapping (QSM), which is an established Magnetic Resonance Imaging (MRI) technique to study the distribution of iron in the brain. Our main objective is investigating potentials of AI-driven frameworks to accurately and efficiently differentiate individuals with Hemochromatosis from those of the healthy control group. More specifically, we developed the Q-Net framework, which is a data-driven model that processes information on iron deposition in the brain obtained from multi-echo gradient echo imaging data and anatomical information on T1-Weighted images of the brain. We illustrate that the Q-Net framework can assist in differentiating between someone with HH and Healthy control (HC) of the same age, something that is not possible by just visualizing images. The study is performed based on a unique dataset that was collected from 52 subjects with HH and 47 HC. The Q-Net provides a differential diagnosis accuracy of 83.16% and 80.37% in the scan-level and image-level classification, respectively.
TEMGNet: Deep Transformer-based Decoding of Upperlimb sEMG for Hand Gestures Recognition
Sep 25, 2021
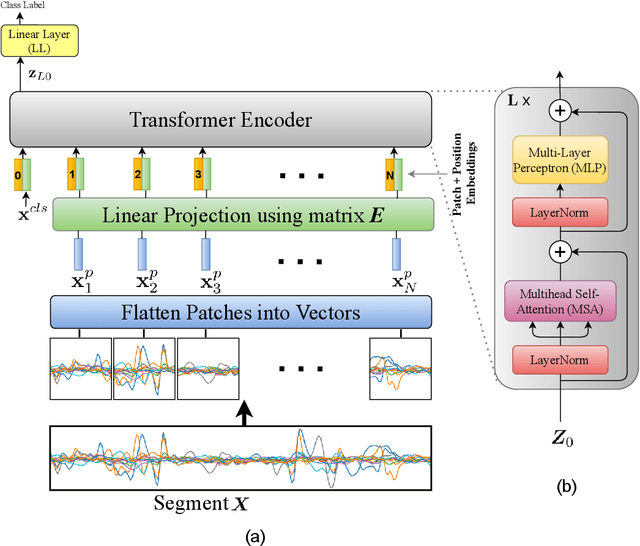
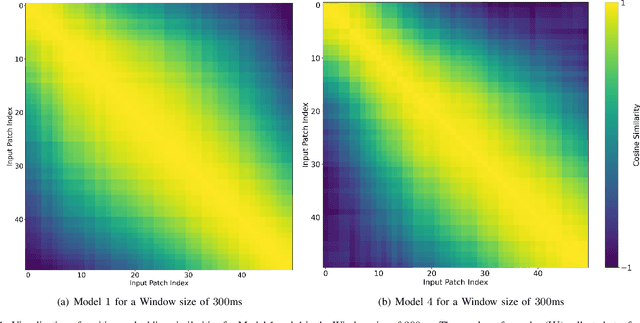
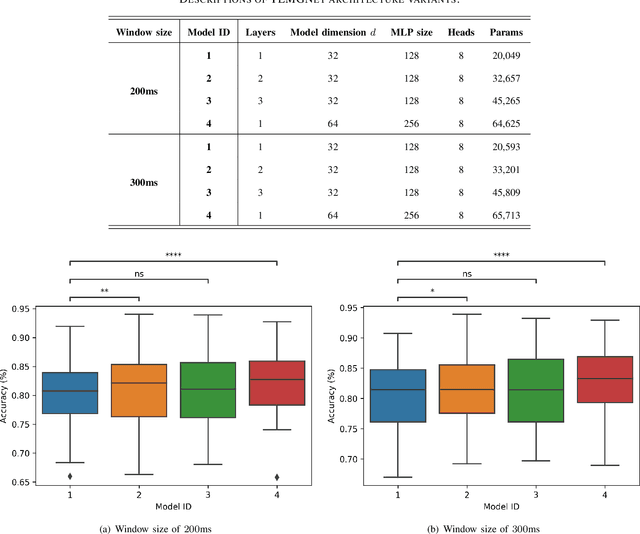
There has been a surge of recent interest in Machine Learning (ML), particularly Deep Neural Network (DNN)-based models, to decode muscle activities from surface Electromyography (sEMG) signals for myoelectric control of neurorobotic systems. DNN-based models, however, require large training sets and, typically, have high structural complexity, i.e., they depend on a large number of trainable parameters. To address these issues, we developed a framework based on the Transformer architecture for processing sEMG signals. We propose a novel Vision Transformer (ViT)-based neural network architecture (referred to as the TEMGNet) to classify and recognize upperlimb hand gestures from sEMG to be used for myocontrol of prostheses. The proposed TEMGNet architecture is trained with a small dataset without the need for pre-training or fine-tuning. To evaluate the efficacy, following the-recent literature, the second subset (exercise B) of the NinaPro DB2 dataset was utilized, where the proposed TEMGNet framework achieved a recognition accuracy of 82.93% and 82.05% for window sizes of 300ms and 200ms, respectively, outperforming its state-of-the-art counterparts. Moreover, the proposed TEMGNet framework is superior in terms of structural capacity while having seven times fewer trainable parameters. These characteristics and the high performance make DNN-based models promising approaches for myoelectric control of neurorobots.
FS-HGR: Few-shot Learning for Hand Gesture Recognition via ElectroMyography
Nov 11, 2020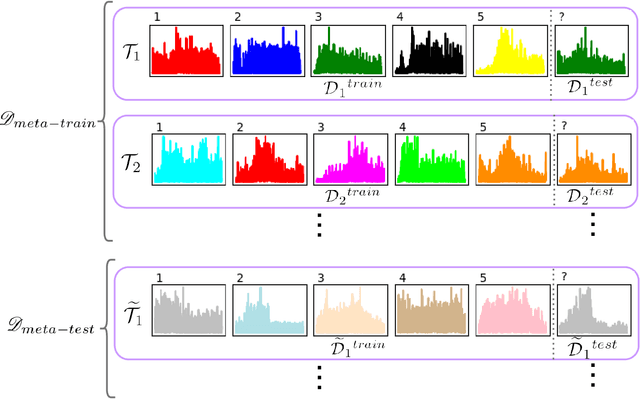
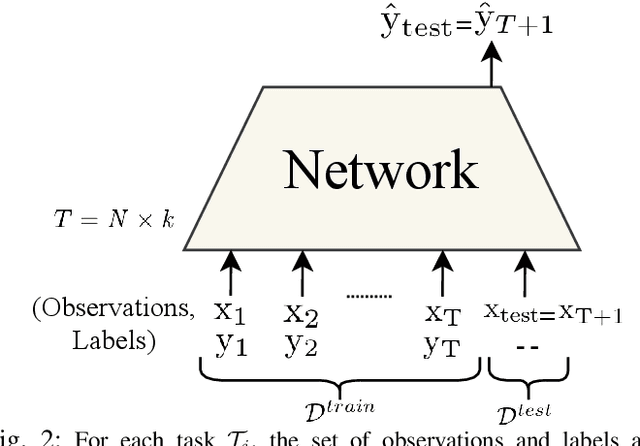
This work is motivated by the recent advances in Deep Neural Networks (DNNs) and their widespread applications in human-machine interfaces. DNNs have been recently used for detecting the intended hand gesture through processing of surface electromyogram (sEMG) signals. The ultimate goal of these approaches is to realize high-performance controllers for prosthetic. However, although DNNs have shown superior accuracy than conventional methods when large amounts of data are available for training, their performance substantially decreases when data are limited. Collecting large datasets for training may be feasible in research laboratories, but it is not a practical approach for real-life applications. Therefore, there is an unmet need for the design of a modern gesture detection technique that relies on minimal training data while providing high accuracy. Here we propose an innovative and novel "Few-Shot Learning" framework based on the formulation of meta-learning, referred to as the FS-HGR, to address this need. Few-shot learning is a variant of domain adaptation with the goal of inferring the required output based on just one or a few training examples. More specifically, the proposed FS-HGR quickly generalizes after seeing very few examples from each class. The proposed approach led to 85.94% classification accuracy on new repetitions with few-shot observation (5-way 5-shot), 81.29% accuracy on new subjects with few-shot observation (5-way 5-shot), and 73.36% accuracy on new gestures with few-shot observation (5-way 5-shot).
XceptionTime: A Novel Deep Architecture based on Depthwise Separable Convolutions for Hand Gesture Classification
Nov 09, 2019

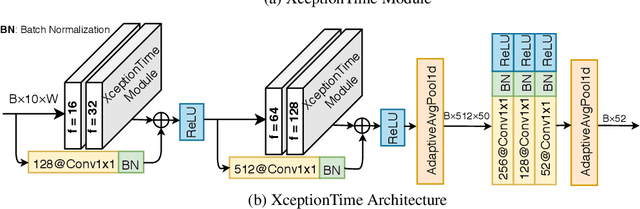

Capitalizing on the need for addressing the existing challenges associated with gesture recognition via sparse multichannel surface Electromyography (sEMG) signals, the paper proposes a novel deep learning model, referred to as the XceptionTime architecture. The proposed innovative XceptionTime is designed by integration of depthwise separable convolutions, adaptive average pooling, and a novel non-linear normalization technique. At the heart of the proposed architecture is several XceptionTime modules concatenated in series fashion designed to capture both temporal and spatial information-bearing contents of the sparse multichannel sEMG signals without the need for data augmentation and/or manual design of feature extraction. In addition, through integration of adaptive average pooling, Conv1D, and the non-linear normalization approach, XceptionTime is less prone to overfitting, more robust to temporal translation of the input, and more importantly is independent from the input window size. Finally, by utilizing the depthwise separable convolutions, the XceptionTime network has far fewer parameters resulting in a less complex network. The performance of XceptionTime is tested on a sub Ninapro dataset, DB1, and the results showed a superior performance in comparison to any existing counterparts. In this regard, 5:71% accuracy improvement, on a window size 200ms, is reported in this paper, for the first time.