 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraHGR: Transformer for Hand Gesture Recognition via ElectroMyography
Paper and Code
Mar 31, 2022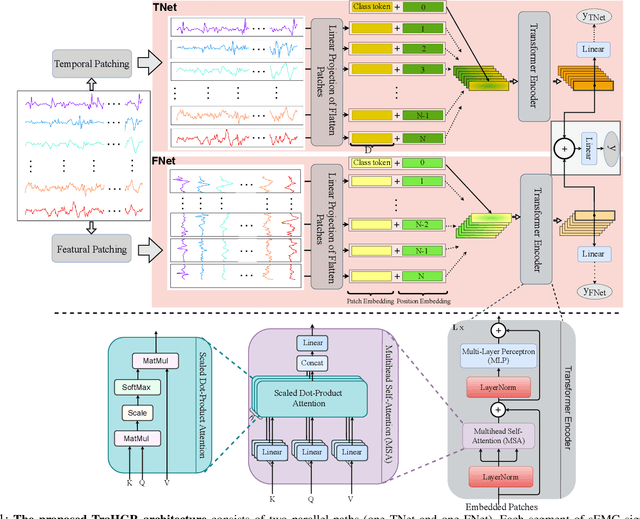
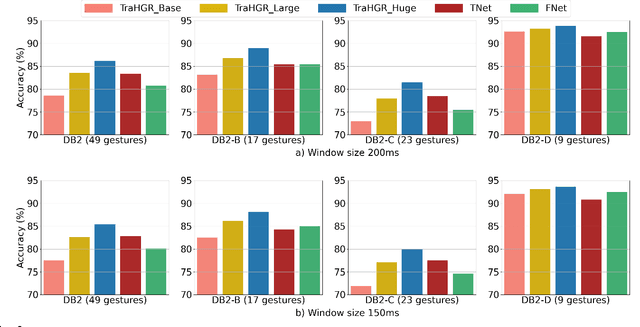
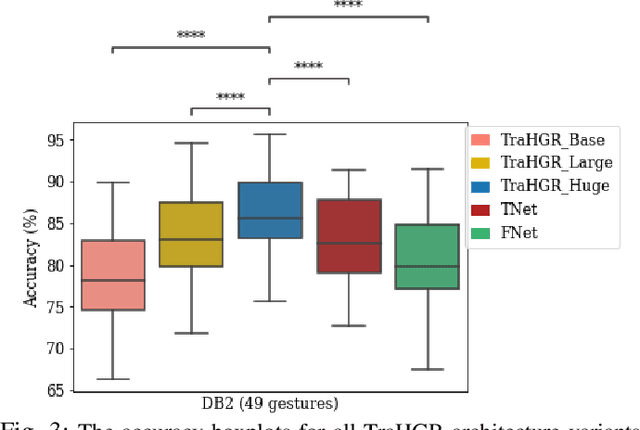
Deep learning-based Hand Gesture Recognition (HGR) via surface Electromyogram (sEMG) signals has recently shown significant potential for development of advanced myoelectric-controlled prosthesis. Existing deep learning approaches, typically, include only one model as such can hardly maintain acceptable generalization performance in changing scenarios. In this paper, we aim to address this challenge by capitalizing on the recent advances of hybrid models and transformers. In other words, we propose a hybrid framework based on the transformer architecture, which is a relatively new and revolutionizing deep learning model. The proposed hybrid architecture, referred to as the Transformer for Hand Gesture Recognition (TraHGR), consists of two parallel paths followed by a linear layer that acts as a fusion center to integrate the advantage of each module and provide robustness over different scenarios. We evaluated the proposed architecture TraHGR based on the commonly used second Ninapro dataset, referred to as the DB2. The sEMG signals in the DB2 dataset are measured in the real-life conditions from 40 healthy users, each performing 49 gestures. We have conducted extensive set of experiments to test and validate the proposed TraHGR architecture, and have compared its achievable accuracy with more than five recently proposed HGR classification algorithms over the same dataset. We have also compared the results of the proposed TraHGR architecture with each individual path and demonstrated the distinguishing power of the proposed hybrid architecture. The recognition accuracies of the proposed TraHGR architecture are 86.18%, 88.91%, 81.44%, and 93.84%, which are 2.48%, 5.12%, 8.82%, and 4.30% higher than the state-ofthe-art performance for DB2 (49 gestures), DB2-B (17 gestures), DB2-C (23 gestures), and DB2-D (9 gestures), respectively.