 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiERO-StepG @ Ego4D Step Grounding Challenge: hierarchical activity understanding enables zero-shot step grounding
May 29, 2026Procedural activities follow well-defined structures: whether we consider a cooking recipe or a mechanic repairing a car, these activities naturally decompose in a hierarchy of steps and sub-steps. Traditional approaches for step grounding require extensive annotations and scale poorly. Instead, we argue that such hierarchical structure can emerge naturally from uncurated videos of human activities through recurring patterns of co-occurring actions and activities. Our approach builds on HiERO, a weakly-supervised representation learning approach that maps close in the feature space actions that are functionally related to each other, leveraging only fine-grained action-level narrations. In this feature space, procedure steps can be detected by a simple clustering, with no additional task-specific fine-tuning. For the Ego4D Step Grounding challenge, we augment this approach by ensuring fine and coarse level agreement in step assignments, enforcing strict temporal monotonicity of the grounded steps and post-processing the detected steps to reduce the impact of noisy predictions. We call this approach HiERO-StepG and it achieves 56.27 % on the R@1 (IoU = 0.3) metric on the global leaderboard at submission time, ranking second while being completely zero-shot and not requiring procedure-specific annotations. Project page: https://github.com/andreazenotto/HiERO-StepG.
Learning reusable concepts across different egocentric video understanding tasks
May 30, 2025Our comprehension of video streams depicting human activities is naturally multifaceted: in just a few moments, we can grasp what is happening, identify the relevance and interactions of objects in the scene, and forecast what will happen soon, everything all at once. To endow autonomous systems with such holistic perception, learning how to correlate concepts, abstract knowledge across diverse tasks, and leverage tasks synergies when learning novel skills is essential. In this paper, we introduce Hier-EgoPack, a unified framework able to create a collection of task perspectives that can be carried across downstream tasks and used as a potential source of additional insights, as a backpack of skills that a robot can carry around and use when needed.
HiERO: understanding the hierarchy of human behavior enhances reasoning on egocentric videos
May 19, 2025Human activities are particularly complex and variable, and this makes challenging for deep learning models to reason about them. However, we note that such variability does have an underlying structure, composed of a hierarchy of patterns of related actions. We argue that such structure can emerge naturally from unscripted videos of human activities, and can be leveraged to better reason about their content. We present HiERO, a weakly-supervised method to enrich video segments features with the corresponding hierarchical activity threads. By aligning video clips with their narrated descriptions, HiERO infers contextual, semantic and temporal reasoning with an hierarchical architecture. We prove the potential of our enriched features with multiple video-text alignment benchmarks (EgoMCQ, EgoNLQ) with minimal additional training, and in zero-shot for procedure learning tasks (EgoProceL and Ego4D Goal-Step). Notably, HiERO achieves state-of-the-art performance in all the benchmarks, and for procedure learning tasks it outperforms fully-supervised methods by a large margin (+12.5% F1 on EgoProceL) in zero shot. Our results prove the relevance of using knowledge of the hierarchy of human activities for multiple reasoning tasks in egocentric vision.
Hier-EgoPack: Hierarchical Egocentric Video Understanding with Diverse Task Perspectives
Feb 04, 2025Our comprehension of video streams depicting human activities is naturally multifaceted: in just a few moments, we can grasp what is happening, identify the relevance and interactions of objects in the scene, and forecast what will happen soon, everything all at once. To endow autonomous systems with such a holistic perception, learning how to correlate concepts, abstract knowledge across diverse tasks, and leverage tasks synergies when learning novel skills is essential. A significant step in this direction is EgoPack, a unified framework for understanding human activities across diverse tasks with minimal overhead. EgoPack promotes information sharing and collaboration among downstream tasks, essential for efficiently learning new skills. In this paper, we introduce Hier-EgoPack, which advances EgoPack by enabling reasoning also across diverse temporal granularities, which expands its applicability to a broader range of downstream tasks. To achieve this, we propose a novel hierarchical architecture for temporal reasoning equipped with a GNN layer specifically designed to tackle the challenges of multi-granularity reasoning effectively. We evaluate our approach on multiple Ego4d benchmarks involving both clip-level and frame-level reasoning, demonstrating how our hierarchical unified architecture effectively solves these diverse tasks simultaneously.
Egocentric zone-aware action recognition across environments
Sep 21, 2024



Human activities exhibit a strong correlation between actions and the places where these are performed, such as washing something at a sink. More specifically, in daily living environments we may identify particular locations, hereinafter named activity-centric zones, which may afford a set of homogeneous actions. Their knowledge can serve as a prior to favor vision models to recognize human activities. However, the appearance of these zones is scene-specific, limiting the transferability of this prior information to unfamiliar areas and domains. This problem is particularly relevant in egocentric vision, where the environment takes up most of the image, making it even more difficult to separate the action from the context. In this paper, we discuss the importance of decoupling the domain-specific appearance of activity-centric zones from their universal, domain-agnostic representations, and show how the latter can improve the cross-domain transferability of Egocentric Action Recognition (EAR) models. We validate our solution on the EPIC-Kitchens-100 and Argo1M datasets
A Backpack Full of Skills: Egocentric Video Understanding with Diverse Task Perspectives
Mar 05, 2024



Human comprehension of a video stream is naturally broad: in a few instants, we are able to understand what is happening, the relevance and relationship of objects, and forecast what will follow in the near future, everything all at once. We believe that - to effectively transfer such an holistic perception to intelligent machines - an important role is played by learning to correlate concepts and to abstract knowledge coming from different tasks, to synergistically exploit them when learning novel skills. To accomplish this, we seek for a unified approach to video understanding which combines shared temporal modelling of human actions with minimal overhead, to support multiple downstream tasks and enable cooperation when learning novel skills. We then propose EgoPack, a solution that creates a collection of task perspectives that can be carried across downstream tasks and used as a potential source of additional insights, as a backpack of skills that a robot can carry around and use when needed. We demonstrate the effectiveness and efficiency of our approach on four Ego4D benchmarks, outperforming current state-of-the-art methods.
EPIC-KITCHENS-100 Unsupervised Domain Adaptation Challenge: Mixed Sequences Prediction
Jul 24, 2023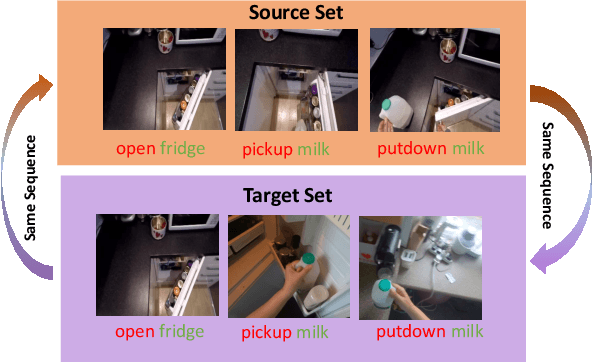



This report presents the technical details of our approach for the EPIC-Kitchens-100 Unsupervised Domain Adaptation (UDA) Challenge in Action Recognition. Our approach is based on the idea that the order in which actions are performed is similar between the source and target domains. Based on this, we generate a modified sequence by randomly combining actions from the source and target domains. As only unlabelled target data are available under the UDA setting, we use a standard pseudo-labeling strategy for extracting action labels for the target. We then ask the network to predict the resulting action sequence. This allows to integrate information from both domains during training and to achieve better transfer results on target. Additionally, to better incorporate sequence information, we use a language model to filter unlikely sequences. Lastly, we employed a co-occurrence matrix to eliminate unseen combinations of verbs and nouns. Our submission, labeled as 'sshayan', can be found on the leaderboard, where it currently holds the 2nd position for 'verb' and the 4th position for both 'noun' and 'action'.