 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle GPU Task Adaptation of Pathology Foundation Models for Whole Slide Image Analysis
Jun 05, 2025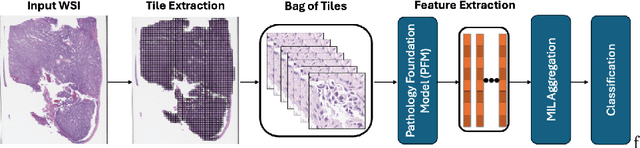
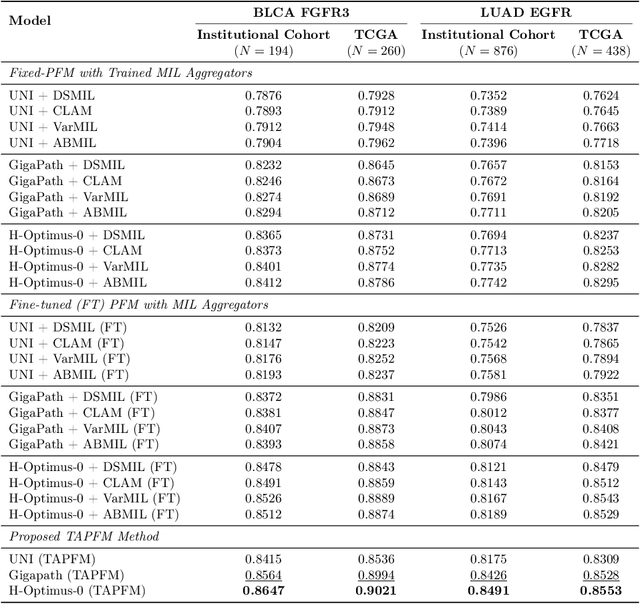
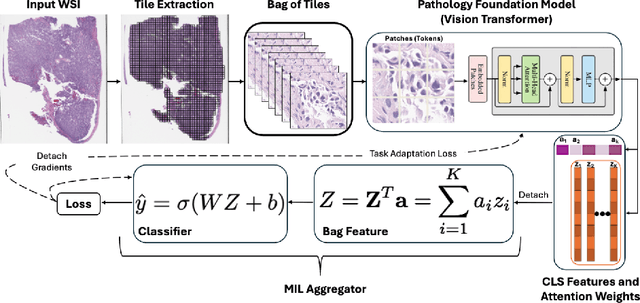
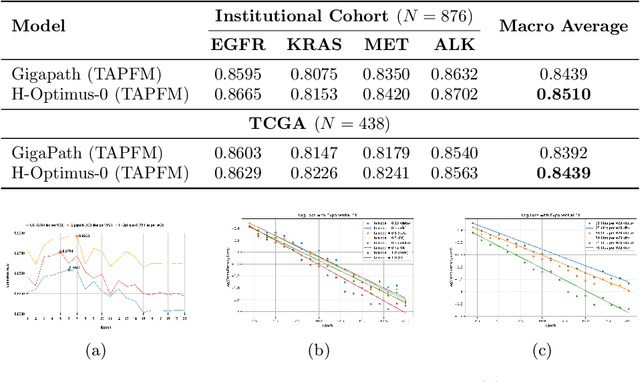
Pathology foundation models (PFMs) have emerged as powerful tools for analyzing whole slide images (WSIs). However, adapting these pretrained PFMs for specific clinical tasks presents considerable challenges, primarily due to the availability of only weak (WSI-level) labels for gigapixel images, necessitating multiple instance learning (MIL) paradigm for effective WSI analysis. This paper proposes a novel approach for single-GPU \textbf{T}ask \textbf{A}daptation of \textbf{PFM}s (TAPFM) that uses vision transformer (\vit) attention for MIL aggregation while optimizing both for feature representations and attention weights. The proposed approach maintains separate computational graphs for MIL aggregator and the PFM to create stable training dynamics that align with downstream task objectives during end-to-end adaptation. Evaluated on mutation prediction tasks for bladder cancer and lung adenocarcinoma across institutional and TCGA cohorts, TAPFM consistently outperforms conventional approaches, with H-Optimus-0 (TAPFM) outperforming the benchmarks. TAPFM effectively handles multi-label classification of actionable mutations as well. Thus, TAPFM makes adaptation of powerful pre-trained PFMs practical on standard hardware for various clinical applications.
Decision Making for Human-in-the-loop Robotic Agents via Uncertainty-Aware Reinforcement Learning
Mar 14, 2023In a Human-in-the-Loop paradigm, a robotic agent is able to act mostly autonomously in solving a task, but can request help from an external expert when needed. However, knowing when to request such assistance is critical: too few requests can lead to the robot making mistakes, but too many requests can overload the expert. In this paper, we present a Reinforcement Learning based approach to this problem, where a semi-autonomous agent asks for external assistance when it has low confidence in the eventual success of the task. The confidence level is computed by estimating the variance of the return from the current state. We show that this estimate can be iteratively improved during training using a Bellman-like recursion. On discrete navigation problems with both fully- and partially-observable state information, we show that our method makes effective use of a limited budget of expert calls at run-time, despite having no access to the expert at training time.