 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChannel and Spatial Relation-Propagation Network for RGB-Thermal Semantic Segmentation
Aug 24, 2023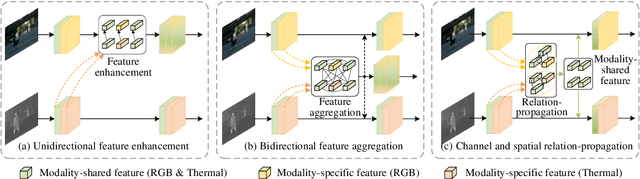
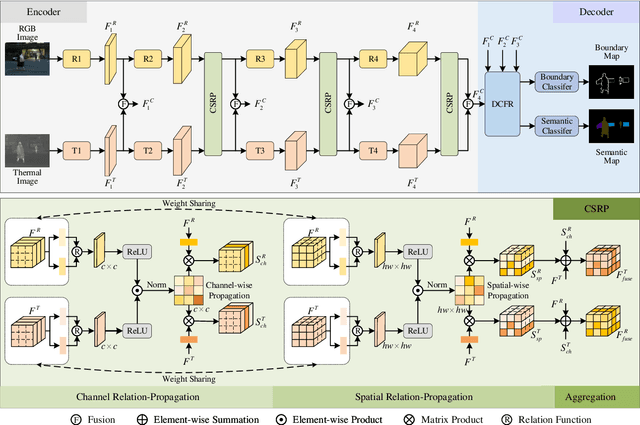

RGB-Thermal (RGB-T) semantic segmentation has shown great potential in handling low-light conditions where RGB-based segmentation is hindered by poor RGB imaging quality. The key to RGB-T semantic segmentation is to effectively leverage the complementarity nature of RGB and thermal images. Most existing algorithms fuse RGB and thermal information in feature space via concatenation, element-wise summation, or attention operations in either unidirectional enhancement or bidirectional aggregation manners. However, they usually overlook the modality gap between RGB and thermal images during feature fusion, resulting in modality-specific information from one modality contaminating the other. In this paper, we propose a Channel and Spatial Relation-Propagation Network (CSRPNet) for RGB-T semantic segmentation, which propagates only modality-shared information across different modalities and alleviates the modality-specific information contamination issue. Our CSRPNet first performs relation-propagation in channel and spatial dimensions to capture the modality-shared features from the RGB and thermal features. CSRPNet then aggregates the modality-shared features captured from one modality with the input feature from the other modality to enhance the input feature without the contamination issue. While being fused together, the enhanced RGB and thermal features will be also fed into the subsequent RGB or thermal feature extraction layers for interactive feature fusion, respectively. We also introduce a dual-path cascaded feature refinement module that aggregates multi-layer features to produce two refined features for semantic and boundary prediction. Extensive experimental results demonstrate that CSRPNet performs favorably against state-of-the-art algorithms.
Control Input Inference of Mobile Agents under Unknown Objective
Jul 20, 2023Trajectory and control secrecy is an important issue in robotics security. This paper proposes a novel algorithm for the control input inference of a mobile agent without knowing its control objective. Specifically, the algorithm first estimates the target state by applying external perturbations. Then we identify the objective function based on the inverse optimal control, providing the well-posedness proof and the identifiability analysis. Next, we obtain the optimal estimate of the control horizon using binary search. Finally, the agent's control optimization problem is reconstructed and solved to predict its input. Simulation illustrates the efficiency and the performance of the algorithm.