 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarimetric Light Transport Analysis for Specular Inter-reflection
Dec 07, 2023



Polarization is well known for its ability to decompose diffuse and specular reflections. However, the existing decomposition methods only focus on direct reflection and overlook multiple reflections, especially specular inter-reflection. In this paper, we propose a novel decomposition method for handling specular inter-reflection of metal objects by using a unique polarimetric feature: the rotation direction of linear polarization. This rotation direction serves as a discriminative factor between direct and inter-reflection on specular surfaces. To decompose the reflectance components, we actively rotate the linear polarization of incident light and analyze the rotation direction of the reflected light. We evaluate our method using both synthetic and real data, demonstrating its effectiveness in decomposing specular inter-reflections of metal objects. Furthermore, we demonstrate that our method can be combined with other decomposition methods for a detailed analysis of light transport. As a practical application, we show its effectiveness in improving the accuracy of 3D measurement against strong specular inter-reflection.
Physical Cue based Depth-Sensing by Color Coding with Deaberration Network
Aug 01, 2019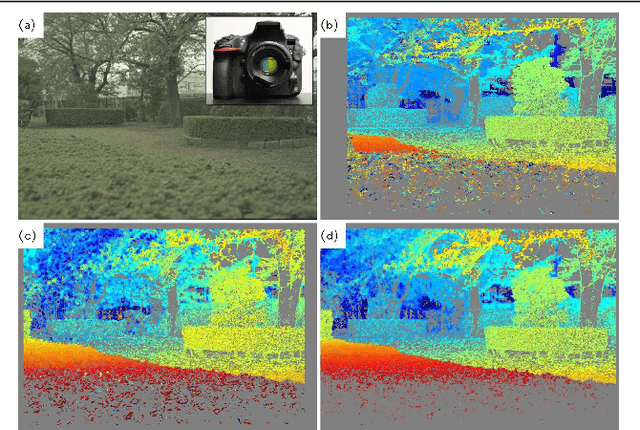
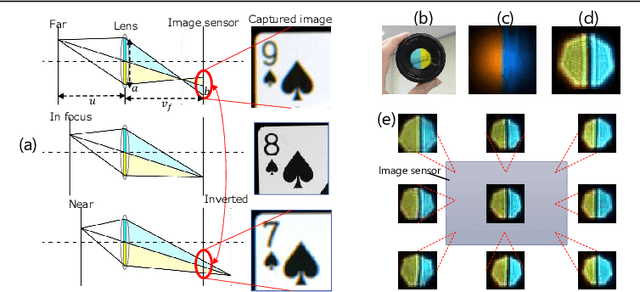
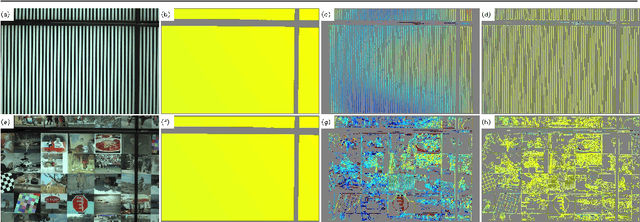
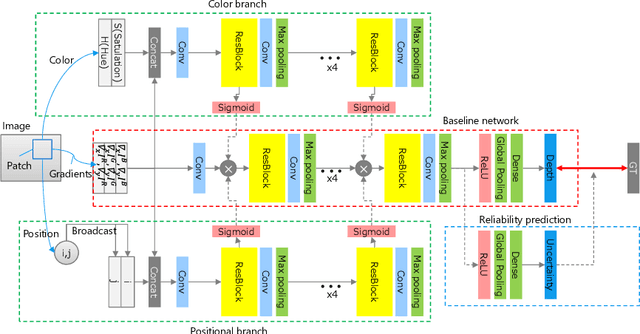
Color-coded aperture (CCA) methods can physically measure the depth of a scene given by physical cues from a single-shot image of a monocular camera. However, they are vulnerable to actual lens aberrations in real scenes because they assume an ideal lens for simplifying algorithms. In this paper, we propose physical cue-based deep learning for CCA photography. To address actual lens aberrations, we developed a deep deaberration network (DDN) that is additionally equipped with a self-attention mechanism of position and color channels to efficiently learn the lens aberration. Furthermore, a new Bayes L1 loss function based on Bayesian deep learning enables to handle the uncertainty of depth estimation more accurately. Quantitative and qualitative comparisons demonstrate that our method is superior to conventional methods including real outdoor scenes. Furthermore, compared to a long-baseline stereo camera, the proposed method provides an error-free depth map at close range, as there is no blind spot between the left and right cameras.
Temporal shape super-resolution by intra-frame motion encoding using high-fps structured light
Oct 02, 2017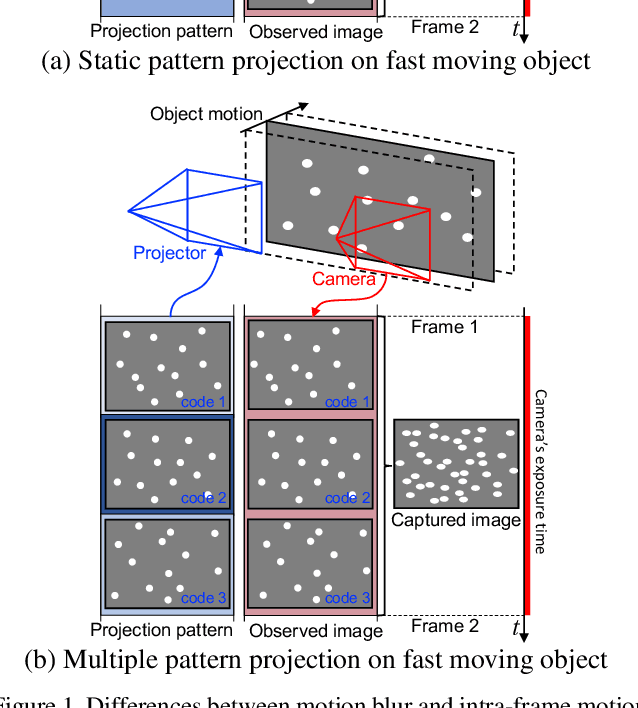
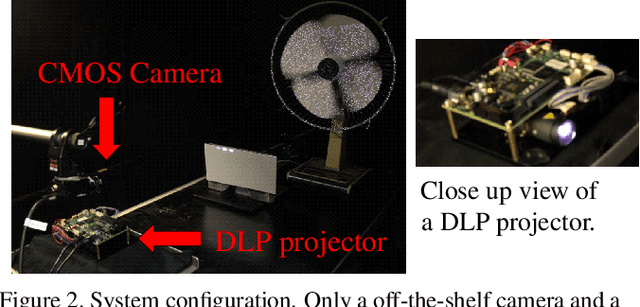
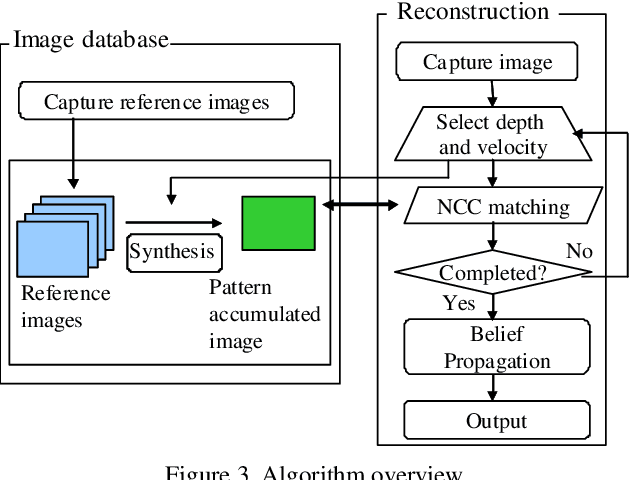
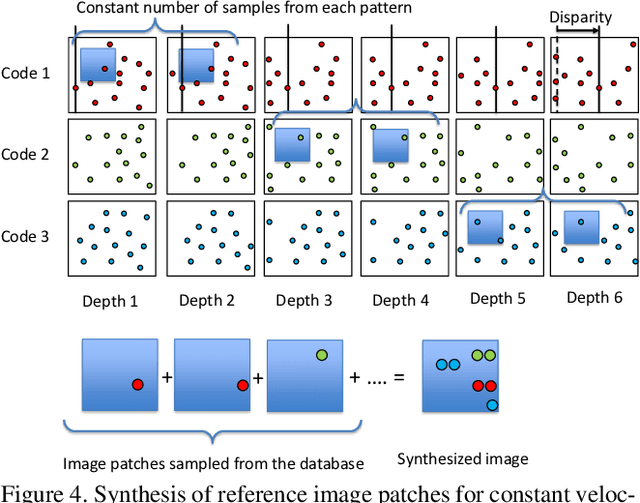
One of the solutions of depth imaging of moving scene is to project a static pattern on the object and use just a single image for reconstruction. However, if the motion of the object is too fast with respect to the exposure time of the image sensor, patterns on the captured image are blurred and reconstruction fails. In this paper, we impose multiple projection patterns into each single captured image to realize temporal super resolution of the depth image sequences. With our method, multiple patterns are projected onto the object with higher fps than possible with a camera. In this case, the observed pattern varies depending on the depth and motion of the object, so we can extract temporal information of the scene from each single image. The decoding process is realized using a learning-based approach where no geometric calibration is needed. Experiments confirm the effectiveness of our method where sequential shapes are reconstructed from a single image. Both quantitative evaluations and comparisons with recent techniques were also conducted.
Simultaneous independent image display technique on multiple 3D objects
Sep 10, 2016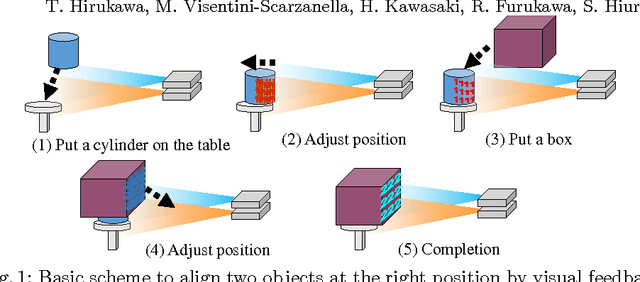
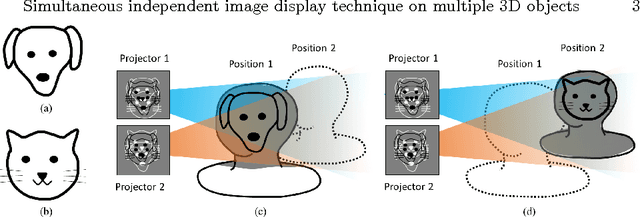
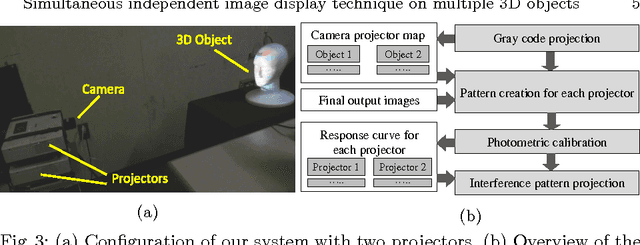
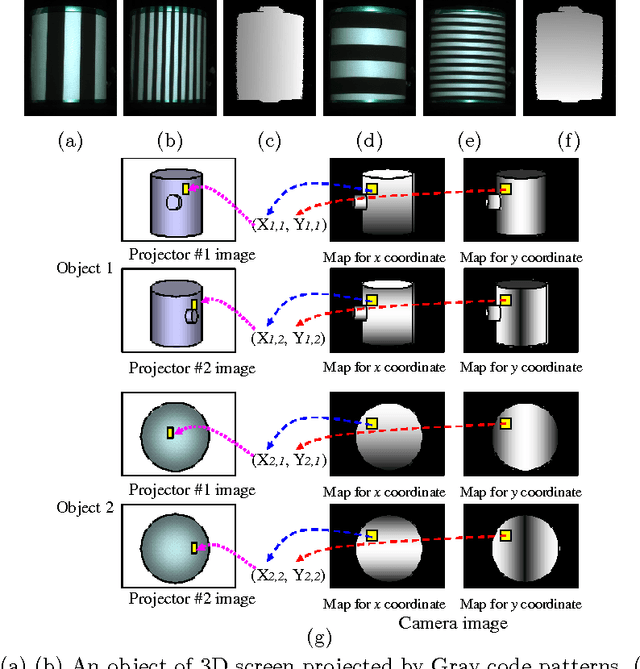
We propose a new system to visualize depth-dependent patterns and images on solid objects with complex geometry using multiple projectors. The system, despite consisting of conventional passive LCD projectors, is able to project different images and patterns depending on the spatial location of the object. The technique is based on the simple principle that multiple patterns projected from multiple projectors interfere constructively with each other when their patterns are projected on the same object. Previous techniques based on the same principle can only achieve 1) low resolution volume colorization or 2) high resolution images but only on a limited number of flat planes. In this paper, we discretize a 3D object into a number of 3D points so that high resolution images can be projected onto the complex shapes. We also propose a dynamic ranges expansion technique as well as an efficient optimization procedure based on epipolar constraints. Such technique can be used to the extend projection mapping to have spatial dependency, which is desirable for practical applications. We also demonstrate the system potential as a visual instructor for object placement and assembling. Experiments prove the effectiveness of our method.