 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Cue based Depth-Sensing by Color Coding with Deaberration Network
Aug 01, 2019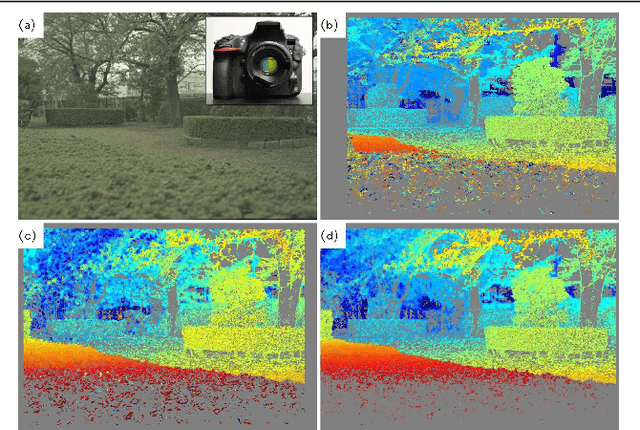
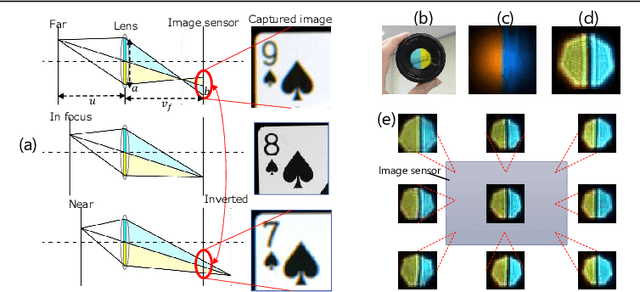
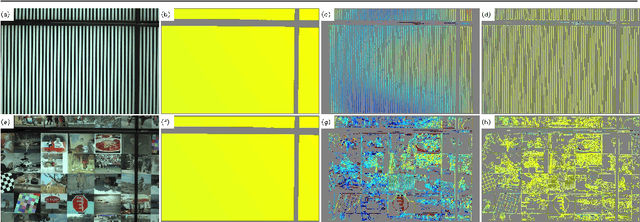
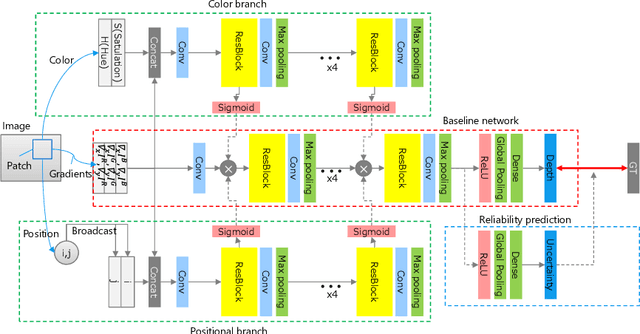
Color-coded aperture (CCA) methods can physically measure the depth of a scene given by physical cues from a single-shot image of a monocular camera. However, they are vulnerable to actual lens aberrations in real scenes because they assume an ideal lens for simplifying algorithms. In this paper, we propose physical cue-based deep learning for CCA photography. To address actual lens aberrations, we developed a deep deaberration network (DDN) that is additionally equipped with a self-attention mechanism of position and color channels to efficiently learn the lens aberration. Furthermore, a new Bayes L1 loss function based on Bayesian deep learning enables to handle the uncertainty of depth estimation more accurately. Quantitative and qualitative comparisons demonstrate that our method is superior to conventional methods including real outdoor scenes. Furthermore, compared to a long-baseline stereo camera, the proposed method provides an error-free depth map at close range, as there is no blind spot between the left and right cameras.
BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks
Jul 18, 2017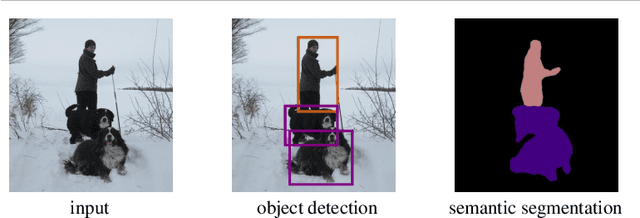
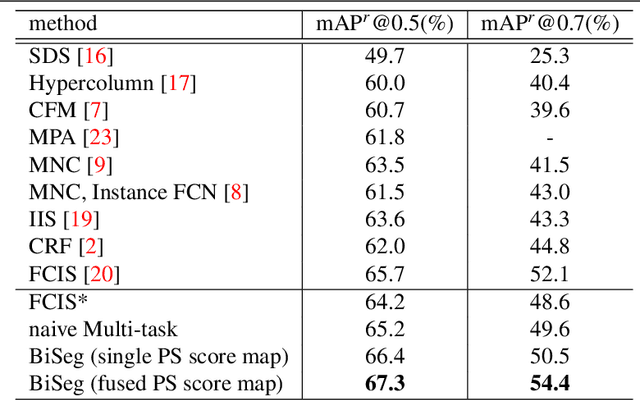
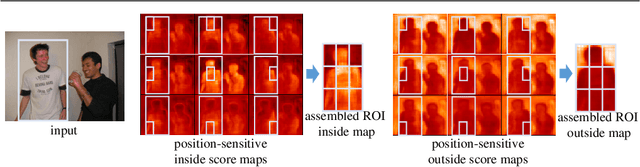
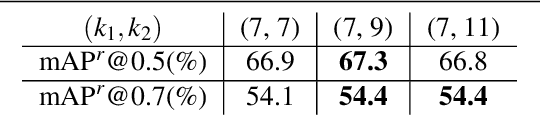
We present a simple and effective framework for simultaneous semantic segmentation and instance segmentation with Fully Convolutional Networks (FCNs). The method, called BiSeg, predicts instance segmentation as a posterior in Bayesian inference, where semantic segmentation is used as a prior. We extend the idea of position-sensitive score maps used in recent methods to a fusion of multiple score maps at different scales and partition modes, and adopt it as a robust likelihood for instance segmentation inference. As both Bayesian inference and map fusion are performed per pixel, BiSeg is a fully convolutional end-to-end solution that inherits all the advantages of FCNs. We demonstrate state-of-the-art instance segmentation accuracy on PASCAL VOC.