 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA nonlinear hidden layer enables actor-critic agents to learn multiple paired association navigation
Jul 16, 2021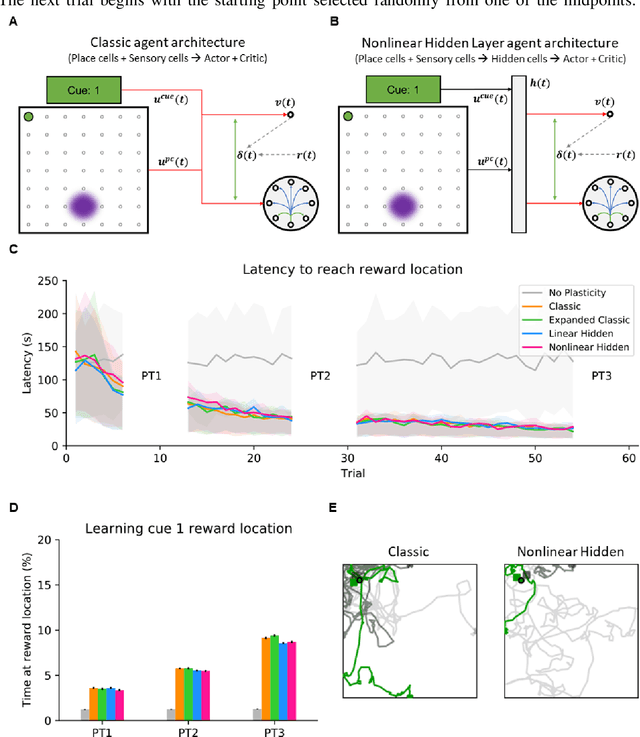
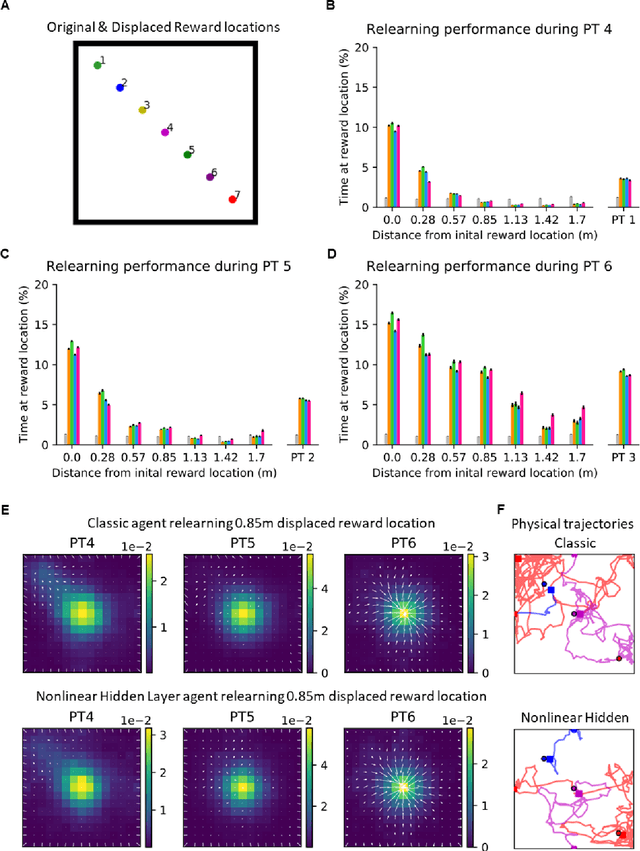

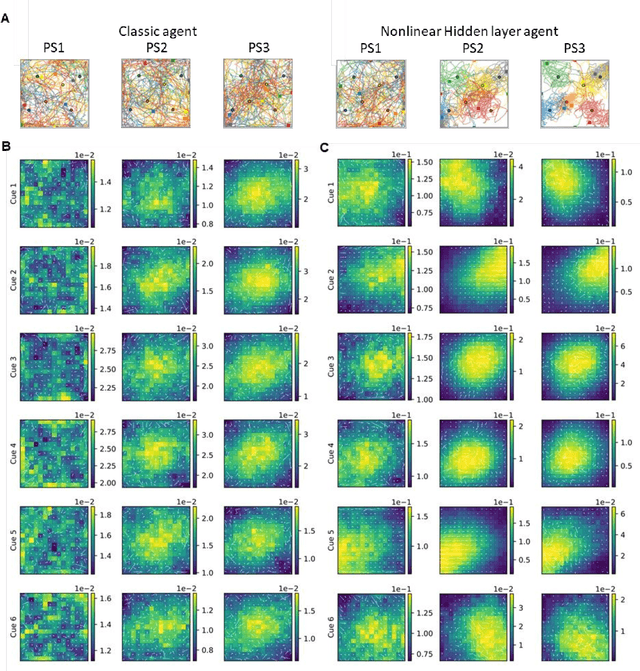
Navigation to multiple cued reward locations has been increasingly used to study rodent learning. Though deep reinforcement learning agents have been shown to be able to learn the task, they are not biologically plausible. Biologically plausible classic actor-critic agents have been shown to learn to navigate to single reward locations, but which biologically plausible agents are able to learn multiple cue-reward location tasks has remained unclear. In this computational study, we show versions of classic agents that learn to navigate to a single reward location, and adapt to reward location displacement, but are not able to learn multiple paired association navigation. The limitation is overcome by an agent in which place cell and cue information are first processed by a feedforward nonlinear hidden layer with synapses to the actor and critic subject to temporal difference error-modulated plasticity. Faster learning is obtained when the feedforward layer is replaced by a recurrent reservoir network.
One-shot learning of paired associations by a reservoir computing model with Hebbian plasticity
Jun 07, 2021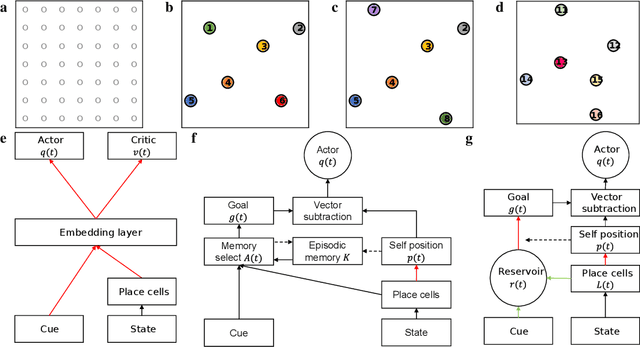
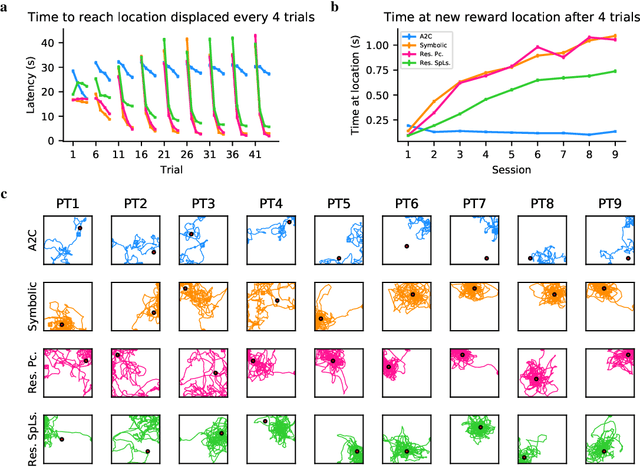


One-shot learning can be achieved by algorithms and animals, but how the latter do it is poorly understood as most of the algorithms are not biologically plausible. Experiments studying one-shot learning in rodents have shown that after initial gradual learning of associations between cues and locations, new associations can be learned with just a single exposure to each new cue-location pair. Foster, Morris and Dayan (2000) developed a hybrid temporal difference - symbolic model that exhibited one-shot learning for dead reckoning to displaced single locations. While the temporal difference rule for learning the agent's actual coordinates was biologically plausible, the model's symbolic mechanism for learning target coordinates was not, and one-shot learning for multiple target locations was not addressed. Here we extend the model by replacing the symbolic mechanism with a reservoir of recurrently connected neurons resembling cortical microcircuitry. Biologically plausible learning of target coordinates was achieved by subjecting the reservoir's output weights to synaptic plasticity governed by a novel 4-factor variant of the exploratory Hebbian (EH) rule. As with rodents, the reservoir model exhibited one-shot learning for multiple paired associations.
Egocentric Spatial Memory
Jul 31, 2018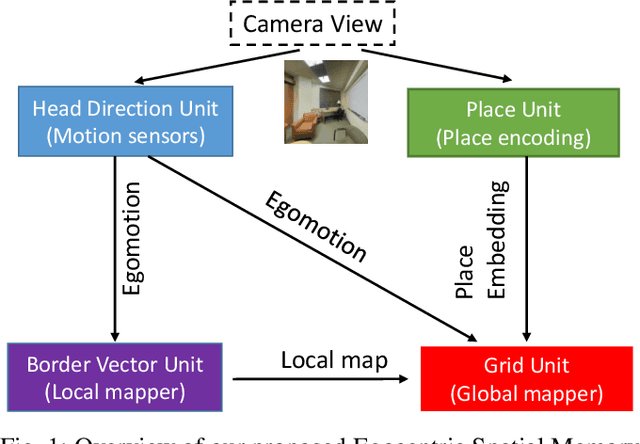
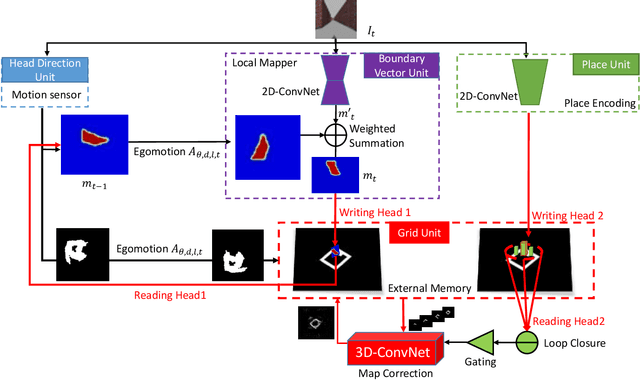
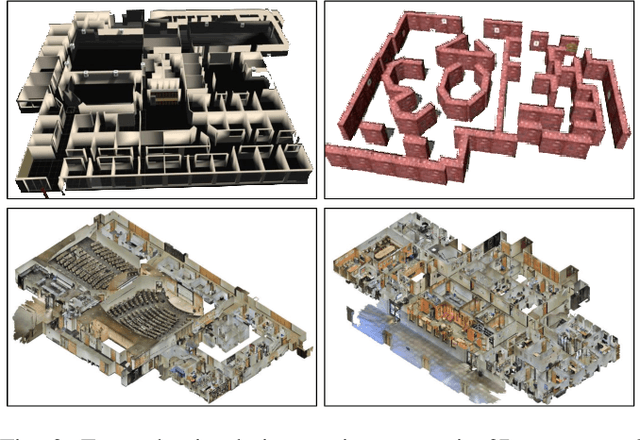
Egocentric spatial memory (ESM) defines a memory system with encoding, storing, recognizing and recalling the spatial information about the environment from an egocentric perspective. We introduce an integrated deep neural network architecture for modeling ESM. It learns to estimate the occupancy state of the world and progressively construct top-down 2D global maps from egocentric views in a spatially extended environment. During the exploration, our proposed ESM model updates belief of the global map based on local observations using a recurrent neural network. It also augments the local mapping with a novel external memory to encode and store latent representations of the visited places over long-term exploration in large environments which enables agents to perform place recognition and hence, loop closure. Our proposed ESM network contributes in the following aspects: (1) without feature engineering, our model predicts free space based on egocentric views efficiently in an end-to-end manner; (2) different from other deep learning-based mapping system, ESMN deals with continuous actions and states which is vitally important for robotic control in real applications. In the experiments, we demonstrate its accurate and robust global mapping capacities in 3D virtual mazes and realistic indoor environments by comparing with several competitive baselines.