 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThink on your feet: Seamless Transition between Human-like Locomotion in Response to Changing Commands
Feb 26, 2025



While it is relatively easier to train humanoid robots to mimic specific locomotion skills, it is more challenging to learn from various motions and adhere to continuously changing commands. These robots must accurately track motion instructions, seamlessly transition between a variety of movements, and master intermediate motions not present in their reference data. In this work, we propose a novel approach that integrates human-like motion transfer with precise velocity tracking by a series of improvements to classical imitation learning. To enhance generalization, we employ the Wasserstein divergence criterion (WGAN-div). Furthermore, a Hybrid Internal Model provides structured estimates of hidden states and velocity to enhance mobile stability and environment adaptability, while a curiosity bonus fosters exploration. Our comprehensive method promises highly human-like locomotion that adapts to varying velocity requirements, direct generalization to unseen motions and multitasking, as well as zero-shot transfer to the simulator and the real world across different terrains. These advancements are validated through simulations across various robot models and extensive real-world experiments.
Implicit Filtering for Learning Neural Signed Distance Functions from 3D Point Clouds
Jul 18, 2024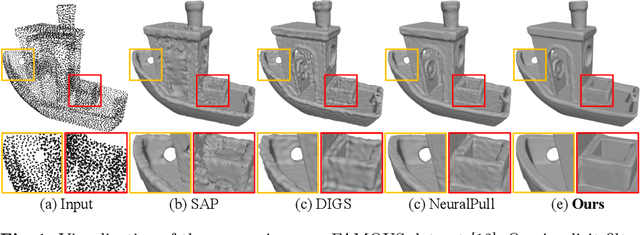
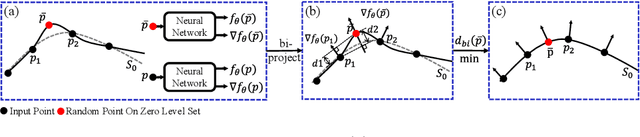
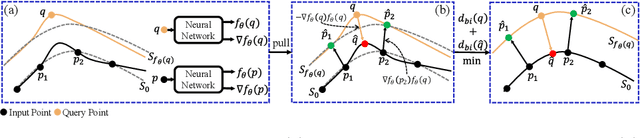
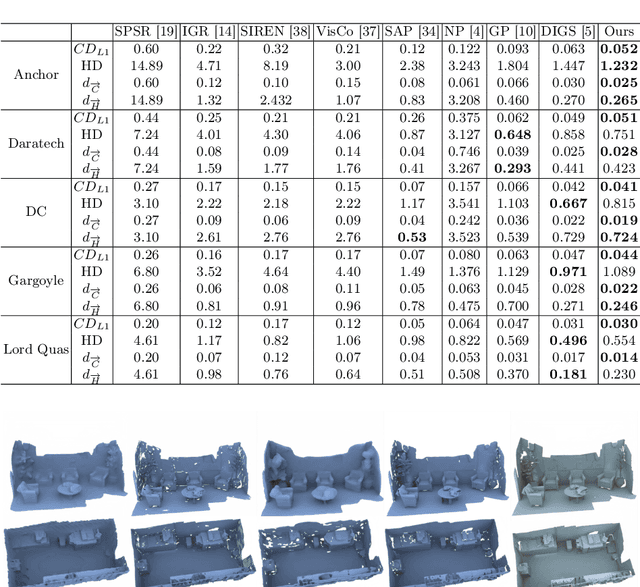
Neural signed distance functions (SDFs) have shown powerful ability in fitting the shape geometry. However, inferring continuous signed distance fields from discrete unoriented point clouds still remains a challenge. The neural network typically fits the shape with a rough surface and omits fine-grained geometric details such as shape edges and corners. In this paper, we propose a novel non-linear implicit filter to smooth the implicit field while preserving high-frequency geometry details. Our novelty lies in that we can filter the surface (zero level set) by the neighbor input points with gradients of the signed distance field. By moving the input raw point clouds along the gradient, our proposed implicit filtering can be extended to non-zero level sets to keep the promise consistency between different level sets, which consequently results in a better regularization of the zero level set. We conduct comprehensive experiments in surface reconstruction from objects and complex scene point clouds, the numerical and visual comparisons demonstrate our improvements over the state-of-the-art methods under the widely used benchmarks.
GridFormer: Point-Grid Transformer for Surface Reconstruction
Jan 04, 2024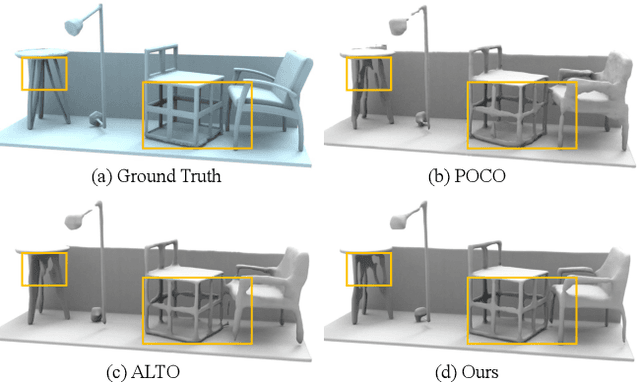
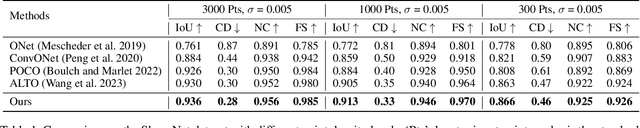
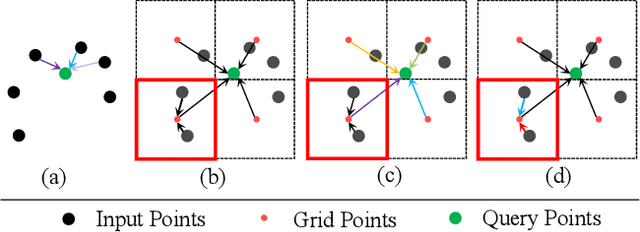
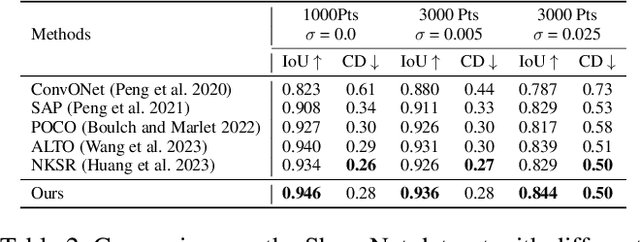
Implicit neural networks have emerged as a crucial technology in 3D surface reconstruction. To reconstruct continuous surfaces from discrete point clouds, encoding the input points into regular grid features (plane or volume) has been commonly employed in existing approaches. However, these methods typically use the grid as an index for uniformly scattering point features. Compared with the irregular point features, the regular grid features may sacrifice some reconstruction details but improve efficiency. To take full advantage of these two types of features, we introduce a novel and high-efficiency attention mechanism between the grid and point features named Point-Grid Transformer (GridFormer). This mechanism treats the grid as a transfer point connecting the space and point cloud. Our method maximizes the spatial expressiveness of grid features and maintains computational efficiency. Furthermore, optimizing predictions over the entire space could potentially result in blurred boundaries. To address this issue, we further propose a boundary optimization strategy incorporating margin binary cross-entropy loss and boundary sampling. This approach enables us to achieve a more precise representation of the object structure. Our experiments validate that our method is effective and outperforms the state-of-the-art approaches under widely used benchmarks by producing more precise geometry reconstructions. The code is available at https://github.com/list17/GridFormer.