 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Shaping of Human Prosociality: A Latent-State POMDP Framework
Mar 02, 2026We propose a decision-theoretic framework in which a robot strategically can shape inferred human's prosocial state during repeated interactions. Modeling the human's prosociality as a latent state that evolves over time, the robot learns to infer and influence this state through its own actions, including helping and signaling. We formalize this as a latent-state POMDP with limited observations and learn the transition and observation dynamics using expectation maximization. The resulting belief-based policy balances task and social objectives, selecting actions that maximize long-term cooperative outcomes. We evaluate the model using data from user studies and show that the learned policy outperforms baseline strategies in both team performance and increasing observed human cooperative behavior.
Toward Informed AV Decision-Making: Computational Model of Well-being and Trust in Mobility
May 21, 2025For future human-autonomous vehicle (AV) interactions to be effective and smooth, human-aware systems that analyze and align human needs with automation decisions are essential. Achieving this requires systems that account for human cognitive states. We present a novel computational model in the form of a Dynamic Bayesian Network (DBN) that infers the cognitive states of both AV users and other road users, integrating this information into the AV's decision-making process. Specifically, our model captures the well-being of both an AV user and an interacting road user as cognitive states alongside trust. Our DBN models infer beliefs over the AV user's evolving well-being, trust, and intention states, as well as the possible well-being of other road users, based on observed interaction experiences. Using data collected from an interaction study, we refine the model parameters and empirically assess its performance. Finally, we extend our model into a causal inference model (CIM) framework for AV decision-making, enabling the AV to enhance user well-being and trust while balancing these factors with its own operational costs and the well-being of interacting road users. Our evaluation demonstrates the model's effectiveness in accurately predicting user's states and guiding informed, human-centered AV decisions.
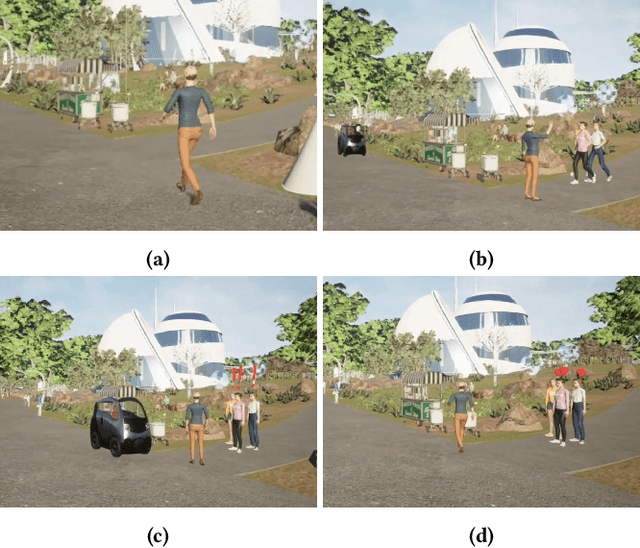
Can we enhance prosocial behavior? Using post-ride feedback to improve micromobility interactions
Sep 05, 2024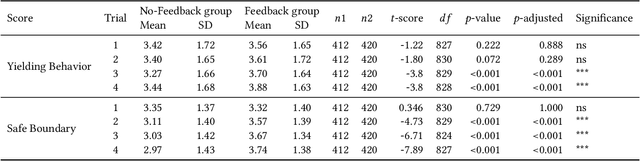
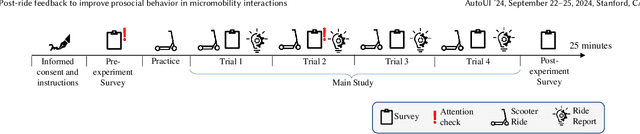

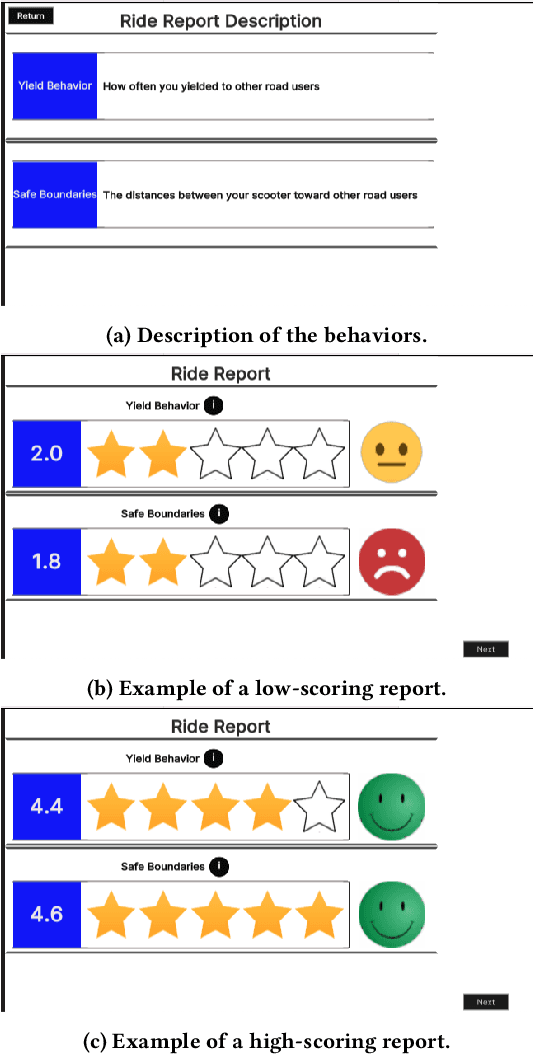
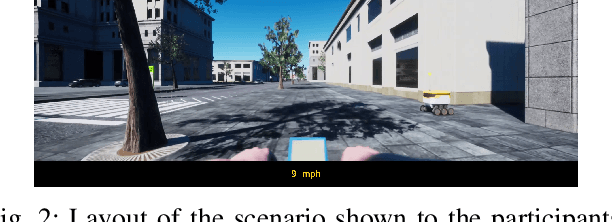
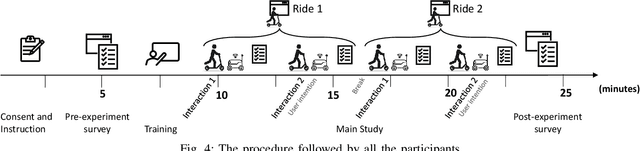
Micromobility devices, such as e-scooters and delivery robots, hold promise for eco-friendly and cost-effective alternatives for future urban transportation. However, their lack of societal acceptance remains a challenge. Therefore, we must consider ways to promote prosocial behavior in micromobility interactions. We investigate how post-ride feedback can encourage the prosocial behavior of e-scooter riders while interacting with sidewalk users, including pedestrians and delivery robots. Using a web-based platform, we measure the prosocial behavior of e-scooter riders. Results found that post-ride feedback can successfully promote prosocial behavior, and objective measures indicated better gap behavior, lower speeds at interaction, and longer stopping time around other sidewalk actors. The findings of this study demonstrate the efficacy of post-ride feedback and provide a step toward designing methodologies to improve the prosocial behavior of mobility users.
Should I Help a Delivery Robot? Cultivating Prosocial Norms through Observations
Mar 27, 2024
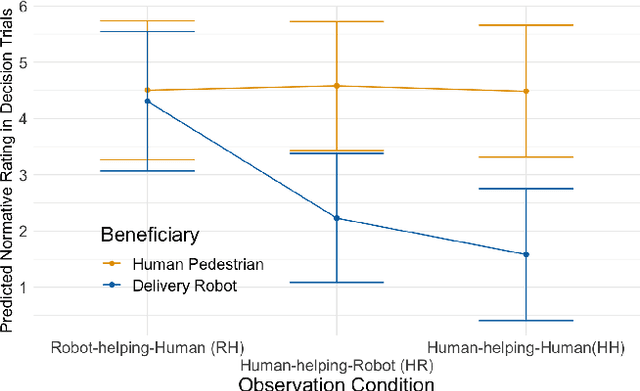
We propose leveraging prosocial observations to cultivate new social norms to encourage prosocial behaviors toward delivery robots. With an online experiment, we quantitatively assess updates in norm beliefs regarding human-robot prosocial behaviors through observational learning. Results demonstrate the initially perceived normativity of helping robots is influenced by familiarity with delivery robots and perceptions of robots' social intelligence. Observing human-robot prosocial interactions notably shifts peoples' normative beliefs about prosocial actions; thereby changing their perceived obligations to offer help to delivery robots. Additionally, we found that observing robots offering help to humans, rather than receiving help, more significantly increased participants' feelings of obligation to help robots. Our findings provide insights into prosocial design for future mobility systems. Improved familiarity with robot capabilities and portraying them as desirable social partners can help foster wider acceptance. Furthermore, robots need to be designed to exhibit higher levels of interactivity and reciprocal capabilities for prosocial behavior.
Wellbeing in Future Mobility: Toward AV Policy Design to Increase Wellbeing through Interactions
Oct 02, 2023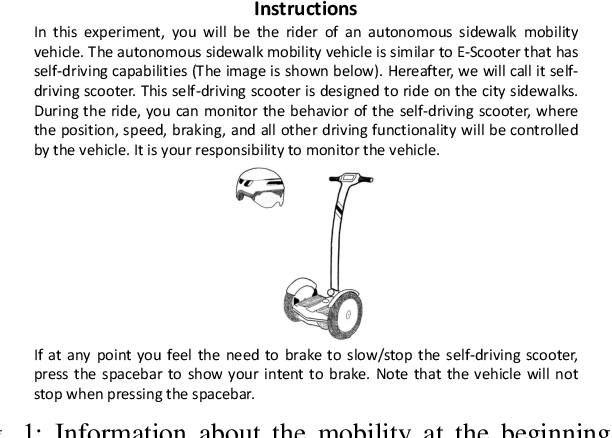

Recent advances in Automated vehicle (AV) technology and micromobility devices promise a transformational change in the future of mobility usage. These advances also pose challenges concerning human-AV interactions. To ensure the smooth adoption of these new mobilities, it is essential to assess how past experiences and perceptions of social interactions by people may impact the interactions with AV mobility. This research identifies and estimates an individual's wellbeing based on their actions, prior experiences, social interaction perceptions, and dyadic interactions with other road users. An online video-based user study was designed, and responses from 300 participants were collected and analyzed to investigate the impact on individual wellbeing. A machine learning model was designed to predict the change in wellbeing. An optimal policy based on the model allows informed AV actions toward its yielding behavior with other road users to enhance users' wellbeing. The findings from this study have broader implications for creating human-aware systems by creating policies that align with the individual state and contribute toward designing systems that align with an individual's state of wellbeing.
Trust in Shared Automated Vehicles: Study on Two Mobility Platforms
Mar 17, 2023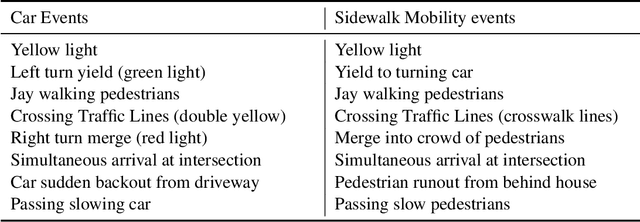

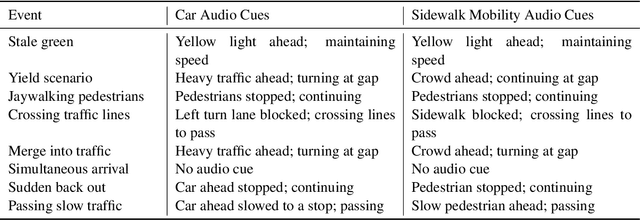

The ever-increasing adoption of shared transportation modalities across the United States has the potential to fundamentally change the preferences and usage of different mobilities. It also raises several challenges with respect to the design and development of automated mobilities that can enable a large population to take advantage of this emergent technology. One such challenge is the lack of understanding of how trust in one automated mobility may impact trust in another. Without this understanding, it is difficult for researchers to determine whether future mobility solutions will have acceptance within different population groups. This study focuses on identifying the differences in trust across different mobility and how trust evolves across their use for participants who preferred an aggressive driving style. A dual mobility simulator study was designed in which 48 participants experienced two different automated mobilities (car and sidewalk). The results found that participants showed increasing levels of trust when they transitioned from the car to the sidewalk mobility. In comparison, participants showed decreasing levels of trust when they transitioned from the sidewalk to the car mobility. The findings from the study help inform and identify how people can develop trust in future mobility platforms and could inform the design of interventions that may help improve the trust and acceptance of future mobility.
* https://trid.trb.org/view/2117834