 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStep-GUI Technical Report
Dec 19, 2025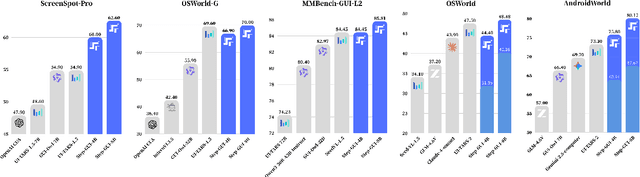
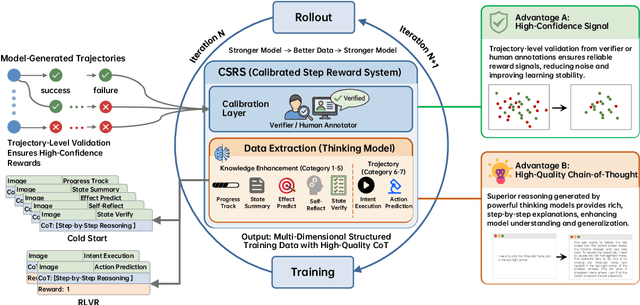
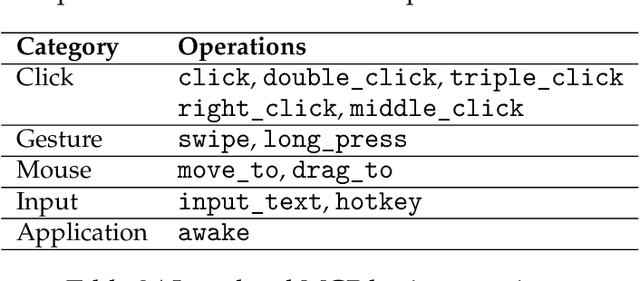
Recent advances in multimodal large language models unlock unprecedented opportunities for GUI automation. However, a fundamental challenge remains: how to efficiently acquire high-quality training data while maintaining annotation reliability? We introduce a self-evolving training pipeline powered by the Calibrated Step Reward System, which converts model-generated trajectories into reliable training signals through trajectory-level calibration, achieving >90% annotation accuracy with 10-100x lower cost. Leveraging this pipeline, we introduce Step-GUI, a family of models (4B/8B) that achieves state-of-the-art GUI performance (8B: 80.2% AndroidWorld, 48.5% OSWorld, 62.6% ScreenShot-Pro) while maintaining robust general capabilities. As GUI agent capabilities improve, practical deployment demands standardized interfaces across heterogeneous devices while protecting user privacy. To this end, we propose GUI-MCP, the first Model Context Protocol for GUI automation with hierarchical architecture that combines low-level atomic operations and high-level task delegation to local specialist models, enabling high-privacy execution where sensitive data stays on-device. Finally, to assess whether agents can handle authentic everyday usage, we introduce AndroidDaily, a benchmark grounded in real-world mobile usage patterns with 3146 static actions and 235 end-to-end tasks across high-frequency daily scenarios (8B: static 89.91%, end-to-end 52.50%). Our work advances the development of practical GUI agents and demonstrates strong potential for real-world deployment in everyday digital interactions.
HVOFusion: Incremental Mesh Reconstruction Using Hybrid Voxel Octree
Apr 27, 2024



Incremental scene reconstruction is essential to the navigation in robotics. Most of the conventional methods typically make use of either TSDF (truncated signed distance functions) volume or neural networks to implicitly represent the surface. Due to the voxel representation or involving with time-consuming sampling, they have difficulty in balancing speed, memory storage, and surface quality. In this paper, we propose a novel hybrid voxel-octree approach to effectively fuse octree with voxel structures so that we can take advantage of both implicit surface and explicit triangular mesh representation. Such sparse structure preserves triangular faces in the leaf nodes and produces partial meshes sequentially for incremental reconstruction. This storage scheme allows us to naturally optimize the mesh in explicit 3D space to achieve higher surface quality. We iteratively deform the mesh towards the target and recovers vertex colors by optimizing a shading model. Experimental results on several datasets show that our proposed approach is capable of quickly and accurately reconstructing a scene with realistic colors.