 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision Transformers for End-to-End Quark-Gluon Jet Classification from Calorimeter Images
Jun 17, 2025Distinguishing between quark- and gluon-initiated jets is a critical and challenging task in high-energy physics, pivotal for improving new physics searches and precision measurements at the Large Hadron Collider. While deep learning, particularly Convolutional Neural Networks (CNNs), has advanced jet tagging using image-based representations, the potential of Vision Transformer (ViT) architectures, renowned for modeling global contextual information, remains largely underexplored for direct calorimeter image analysis, especially under realistic detector and pileup conditions. This paper presents a systematic evaluation of ViTs and ViT-CNN hybrid models for quark-gluon jet classification using simulated 2012 CMS Open Data. We construct multi-channel jet-view images from detector-level energy deposits (ECAL, HCAL) and reconstructed tracks, enabling an end-to-end learning approach. Our comprehensive benchmarking demonstrates that ViT-based models, notably ViT+MaxViT and ViT+ConvNeXt hybrids, consistently outperform established CNN baselines in F1-score, ROC-AUC, and accuracy, highlighting the advantage of capturing long-range spatial correlations within jet substructure. This work establishes the first systematic framework and robust performance baselines for applying ViT architectures to calorimeter image-based jet classification using public collider data, alongside a structured dataset suitable for further deep learning research in this domain.
CAGN-GAT Fusion: A Hybrid Contrastive Attentive Graph Neural Network for Network Intrusion Detection
Mar 02, 2025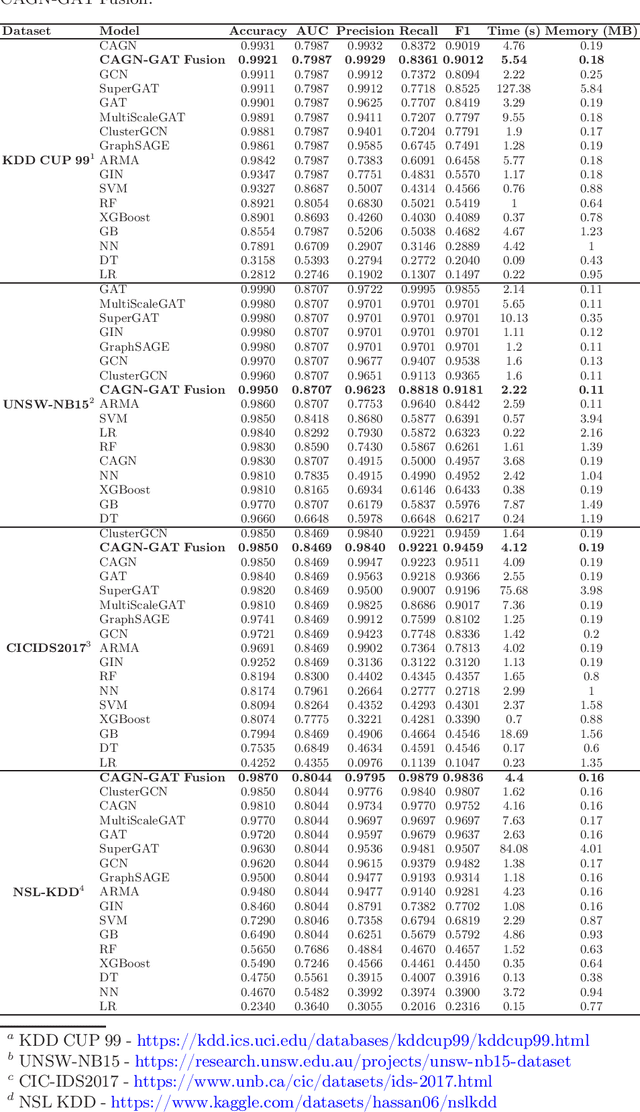
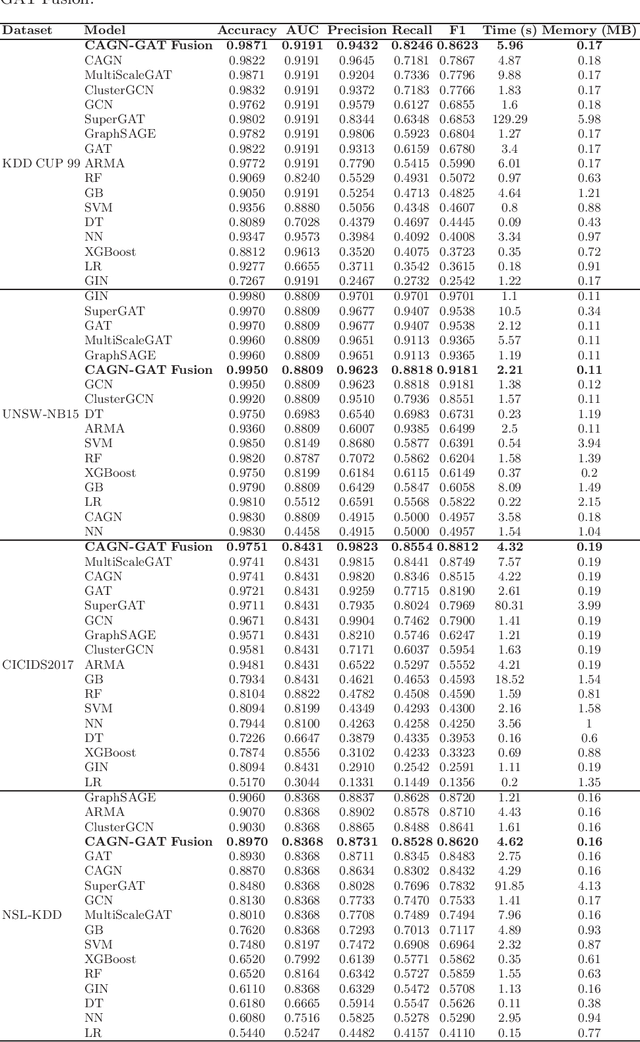
Cybersecurity threats are growing, making network intrusion detection essential. Traditional machine learning models remain effective in resource-limited environments due to their efficiency, requiring fewer parameters and less computational time. However, handling short and highly imbalanced datasets remains challenging. In this study, we propose the fusion of a Contrastive Attentive Graph Network and Graph Attention Network (CAGN-GAT Fusion) and benchmark it against 15 other models, including both Graph Neural Networks (GNNs) and traditional ML models. Our evaluation is conducted on four benchmark datasets (KDD-CUP-1999, NSL-KDD, UNSW-NB15, and CICIDS2017) using a short and proportionally imbalanced dataset with a constant size of 5000 samples to ensure fairness in comparison. Results show that CAGN-GAT Fusion demonstrates stable and competitive accuracy, recall, and F1-score, even though it does not achieve the highest performance in every dataset. Our analysis also highlights the impact of adaptive graph construction techniques, including small changes in connections (edge perturbation) and selective hiding of features (feature masking), improving detection performance. The findings confirm that GNNs, particularly CAGN-GAT Fusion, are robust and computationally efficient, making them well-suited for resource-constrained environments. Future work will explore GraphSAGE layers and multiview graph construction techniques to further enhance adaptability and detection accuracy.
DGNN-YOLO: Interpretable Dynamic Graph Neural Networks with YOLO11 for Small Object Detection and Tracking in Traffic Surveillance
Dec 11, 2024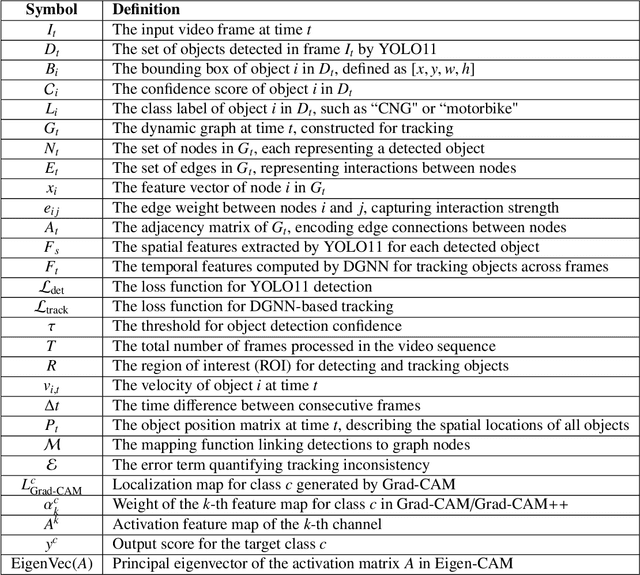
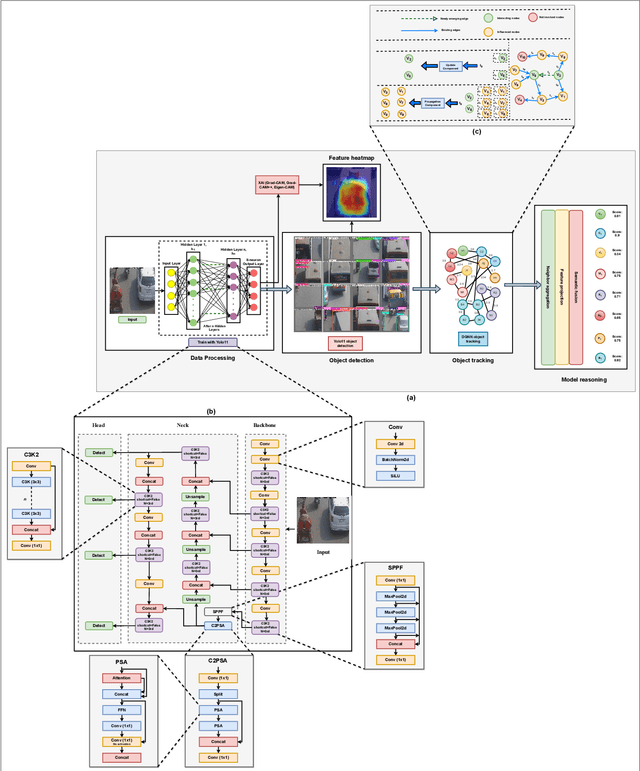
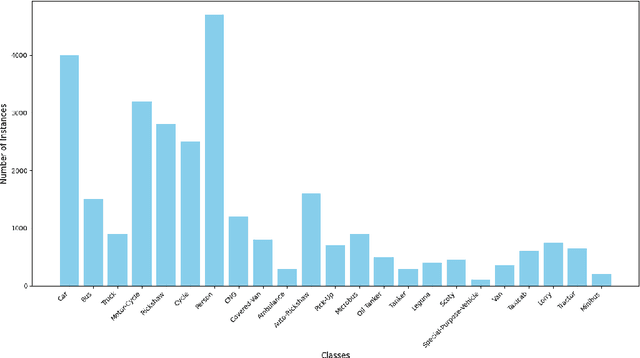
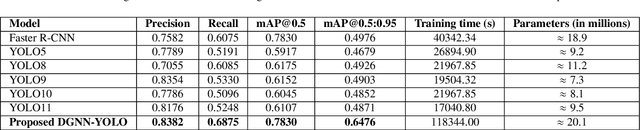
Accurate detection and tracking of small objects, such as pedestrians, cyclists, and motorbikes, is critical for traffic surveillance systems, which are crucial for improving road safety and decision-making in intelligent transportation systems. However, traditional methods face challenges such as occlusion, low resolution, and dynamic traffic conditions, necessitating innovative approaches to address these limitations. This paper introduces DGNN-YOLO, a novel framework integrating dynamic graph neural networks (DGNN) with YOLO11 to enhance small-object detection and tracking in traffic surveillance systems. The framework leverages YOLO11's advanced spatial feature extraction capabilities for precise object detection and incorporates a DGNN to model spatial-temporal relationships for robust real-time tracking dynamically. By constructing and updating graph structures, DGNN-YOLO effectively represents objects as nodes and their interactions as edges, thereby ensuring adaptive and accurate tracking in complex and dynamic environments. Additionally, Grad-CAM, Grad-CAM++, and Eigen-CAM visualization techniques were applied to DGNN-YOLO to provide model-agnostic interpretability and deeper insights into the model's decision-making process, enhancing its transparency and trustworthiness. Extensive experiments demonstrated that DGNN-YOLO consistently outperformed state-of-the-art methods in detecting and tracking small objects under diverse traffic conditions, achieving the highest precision (0.8382), recall (0.6875), and mAP@0.5:0.95 (0.6476), showing its robustness and scalability, particularly in challenging scenarios involving small and occluded objects. This study provides a scalable, real-time traffic surveillance and analysis solution, significantly contributing to intelligent transportation systems.
DGNN-YOLO: Dynamic Graph Neural Networks with YOLO11 for Small Object Detection and Tracking in Traffic Surveillance
Nov 26, 2024Accurate detection and tracking of small objects such as pedestrians, cyclists, and motorbikes are critical for traffic surveillance systems, which are crucial in improving road safety and decision-making in intelligent transportation systems. However, traditional methods struggle with challenges such as occlusion, low resolution, and dynamic traffic conditions, necessitating innovative approaches to address these limitations. This paper introduces DGNN-YOLO, a novel framework integrating dynamic graph neural networks (DGNN) with YOLO11 to enhance small object detection and tracking in traffic surveillance systems. The framework leverages YOLO11's advanced spatial feature extraction capabilities for precise object detection and incorporates DGNN to model spatial-temporal relationships for robust real-time tracking dynamically. By constructing and updating graph structures, DGNN-YOLO effectively represents objects as nodes and their interactions as edges, ensuring adaptive and accurate tracking in complex and dynamic environments. Extensive experiments demonstrate that DGNN-YOLO consistently outperforms state-of-the-art methods in detecting and tracking small objects under diverse traffic conditions, achieving the highest precision (0.8382), recall (0.6875), and mAP@0.5:0.95 (0.6476), showcasing its robustness and scalability, particularly in challenging scenarios involving small and occluded objects. This work provides a scalable, real-time traffic surveillance and analysis solution, significantly contributing to intelligent transportation systems.