 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifelong 3D Mapping Framework for Hand-held & Robot-mounted LiDAR Mapping Systems
Jan 30, 2025



We propose a lifelong 3D mapping framework that is modular, cloud-native by design and more importantly, works for both hand-held and robot-mounted 3D LiDAR mapping systems. Our proposed framework comprises of dynamic point removal, multi-session map alignment, map change detection and map version control. First, our sensor-setup agnostic dynamic point removal algorithm works seamlessly with both hand-held and robot-mounted setups to produce clean static 3D maps. Second, the multi-session map alignment aligns these clean static maps automatically, without manual parameter fine-tuning, into a single reference frame, using a two stage approach based on feature descriptor matching and fine registration. Third, our novel map change detection identifies positive and negative changes between two aligned maps. Finally, the map version control maintains a single base map that represents the current state of the environment, and stores the detected positive and negative changes, and boundary information. Our unique map version control system can reconstruct any of the previous clean session maps and allows users to query changes between any two random mapping sessions, all without storing any input raw session maps, making it very unique. Extensive experiments are performed using hand-held commercial LiDAR mapping devices and open-source robot-mounted LiDAR SLAM algorithms to evaluate each module and the whole 3D lifelong mapping framework.
Intrinsic Bias Identification on Medical Image Datasets
Mar 29, 2022
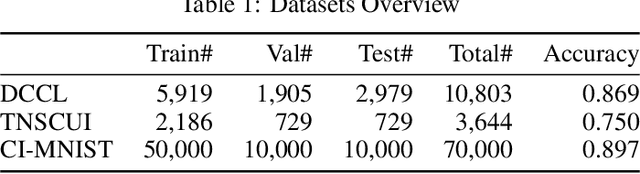
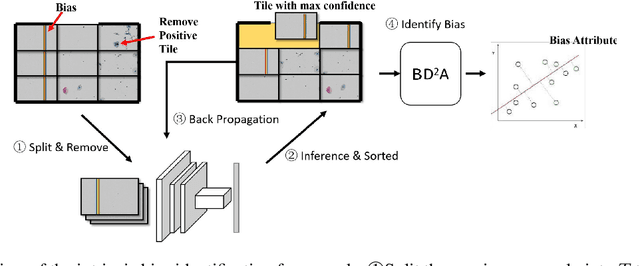
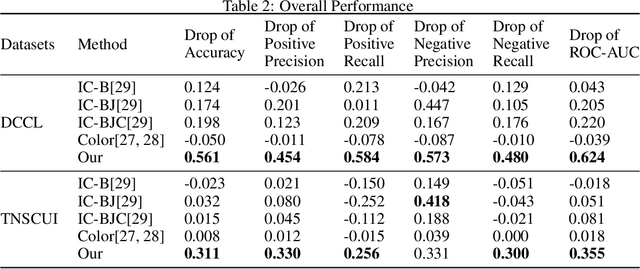
Machine learning based medical image analysis highly depends on datasets. Biases in the dataset can be learned by the model and degrade the generalizability of the applications. There are studies on debiased models. However, scientists and practitioners are difficult to identify implicit biases in the datasets, which causes lack of reliable unbias test datasets to valid models. To tackle this issue, we first define the data intrinsic bias attribute, and then propose a novel bias identification framework for medical image datasets. The framework contains two major components, KlotskiNet and Bias Discriminant Direction Analysis(bdda), where KlostkiNet is to build the mapping which makes backgrounds to distinguish positive and negative samples and bdda provides a theoretical solution on determining bias attributes. Experimental results on three datasets show the effectiveness of the bias attributes discovered by the framework.
DuCN: Dual-children Network for Medical Diagnosis and Similar Case Recommendation towards COVID-19
Aug 03, 2021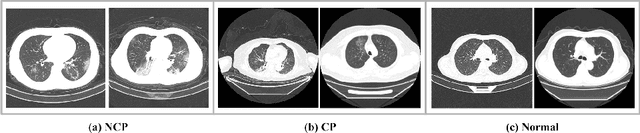

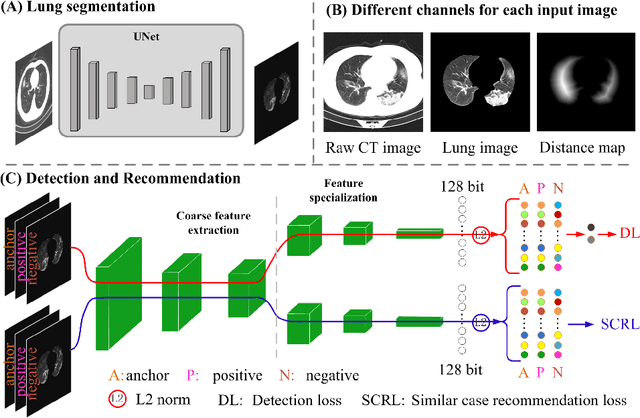

Early detection of the coronavirus disease 2019 (COVID-19) helps to treat patients timely and increase the cure rate, thus further suppressing the spread of the disease. In this study, we propose a novel deep learning based detection and similar case recommendation network to help control the epidemic. Our proposed network contains two stages: the first one is a lung region segmentation step and is used to exclude irrelevant factors, and the second is a detection and recommendation stage. Under this framework, in the second stage, we develop a dual-children network (DuCN) based on a pre-trained ResNet-18 to simultaneously realize the disease diagnosis and similar case recommendation. Besides, we employ triplet loss and intrapulmonary distance maps to assist the detection, which helps incorporate tiny differences between two images and is conducive to improving the diagnostic accuracy. For each confirmed COVID-19 case, we give similar cases to provide radiologists with diagnosis and treatment references. We conduct experiments on a large publicly available dataset (CC-CCII) and compare the proposed model with state-of-the-art COVID-19 detection methods. The results show that our proposed model achieves a promising clinical performance.