 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Segmentation Meets Hyperspectral Image: New Paradigm for Hyperspectral Image Classification
Feb 18, 2025Hyperspectral image (HSI) classification is a cornerstone of remote sensing, enabling precise material and land-cover identification through rich spectral information. While deep learning has driven significant progress in this task, small patch-based classifiers, which account for over 90% of the progress, face limitations: (1) the small patch (e.g., 7x7, 9x9)-based sampling approach considers a limited receptive field, resulting in insufficient spatial structural information critical for object-level identification and noise-like misclassifications even within uniform regions; (2) undefined optimal patch sizes lead to coarse label predictions, which degrade performance; and (3) a lack of multi-shape awareness around objects. To address these challenges, we draw inspiration from large-scale image segmentation techniques, which excel at handling object boundaries-a capability essential for semantic labeling in HSI classification. However, their application remains under-explored in this task due to (1) the prevailing notion that larger patch sizes degrade performance, (2) the extensive unlabeled regions in HSI groundtruth, and (3) the misalignment of input shapes between HSI data and segmentation models. Thus, in this study, we propose a novel paradigm and baseline, HSIseg, for HSI classification that leverages segmentation techniques combined with a novel Dynamic Shifted Regional Transformer (DSRT) to overcome these challenges. We also introduce an intuitive progressive learning framework with adaptive pseudo-labeling to iteratively incorporate unlabeled regions into the training process, thereby advancing the application of segmentation techniques. Additionally, we incorporate auxiliary data through multi-source data collaboration, promoting better feature interaction. Validated on five public HSI datasets, our proposal outperforms state-of-the-art methods.
Rethinking ResNets: Improved Stacking Strategies With High Order Schemes
Apr 12, 2021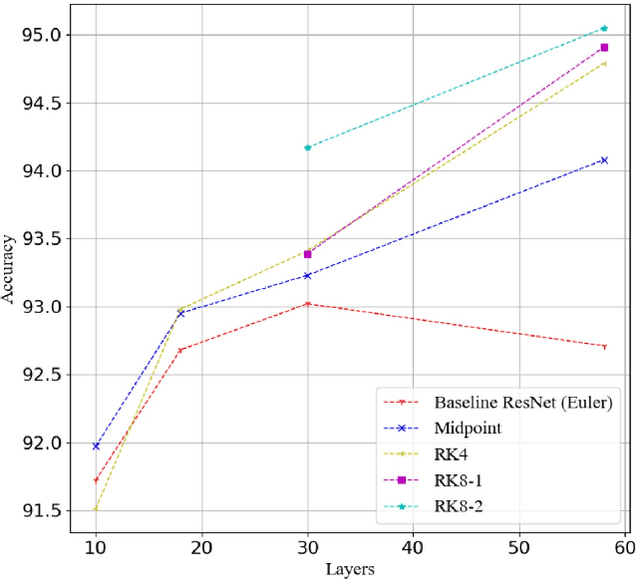
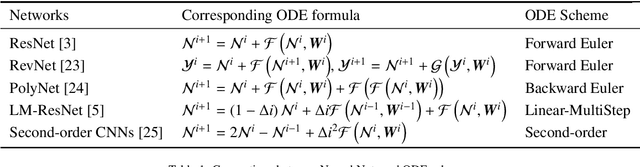
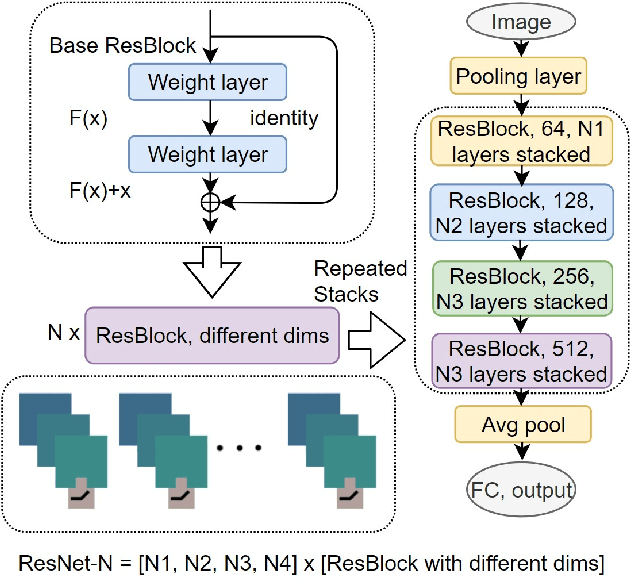
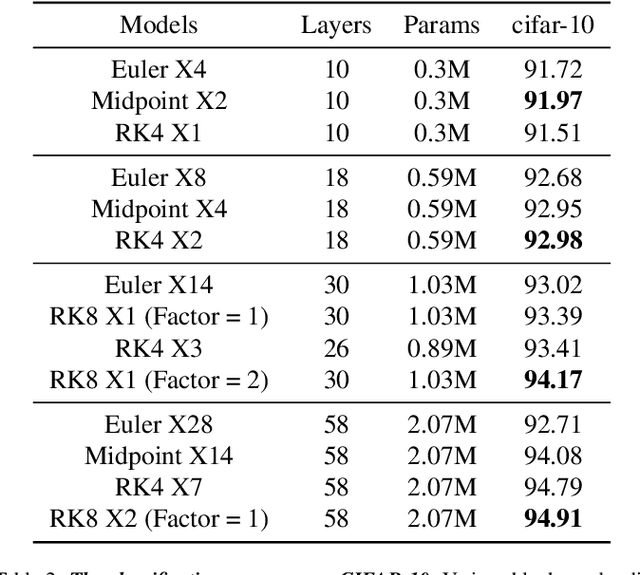
Various Deep Neural Network architectures are keeping massive vital records in computer vision. While drawing attention worldwide, the design of the overall structure somehow lacks general guidance. Based on the relationship between DNN design with numerical differential equations, which several researchers observed in recent years, we perform a fair comparison of residual design with higher-order perspectives. We show that the widely used DNN design strategy, constantly stacking a small design, could be easily improved, supported by solid theoretical knowledge and no extra parameters needed. We reorganize the residual design in higher-order ways, which is inspired by the observation that many effective networks could be interpreted as different numerical discretizations of differential equations. The design of ResNet follows a relatively simple scheme which is Euler forward; however, the situation is getting complicated rapidly while stacking. We suppose stacked ResNet is somehow equalled to a higher order scheme, then the current way of forwarding propagation might be relatively weak compared with a typical high-order method like Runge-Kutta. We propose higher order ResNet to verify the hypothesis on widely used CV benchmarks with sufficient experiments. Stable and noticeable rises in performance are observed, convergence and robustness are benefited.
Fast Non-local Stereo Matching based on Hierarchical Disparity Prediction
Sep 28, 2015

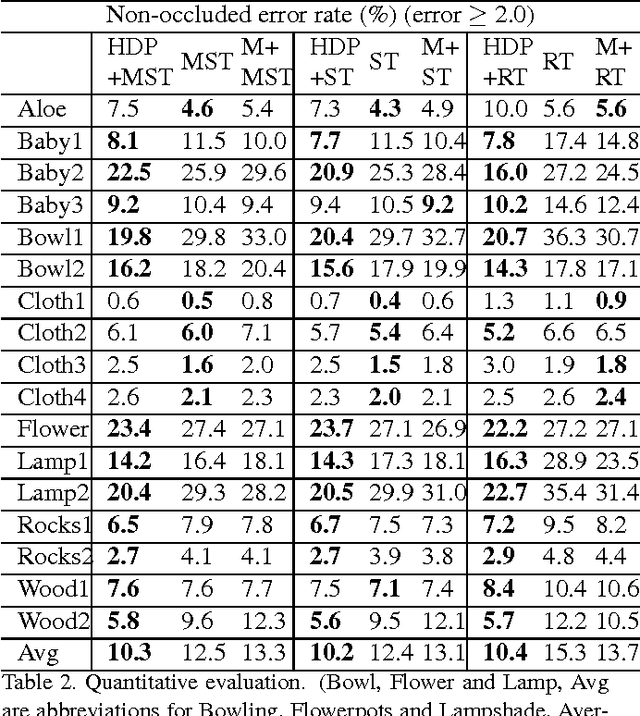
Stereo matching is the key step in estimating depth from two or more images. Recently, some tree-based non-local stereo matching methods have been proposed, which achieved state-of-the-art performance. The algorithms employed some tree structures to aggregate cost and thus improved the performance and reduced the coputation load of the stereo matching. However, the computational complexity of these tree-based algorithms is still high because they search over the entire disparity range. In addition, the extreme greediness of the minimum spanning tree (MST) causes the poor performance in large areas with similar colors but varying disparities. In this paper, we propose an efficient stereo matching method using a hierarchical disparity prediction (HDP) framework to dramatically reduce the disparity search range so as to speed up the tree-based non-local stereo methods. Our disparity prediction scheme works on a graph pyramid derived from an image whose disparity to be estimated. We utilize the disparity of a upper graph to predict a small disparity range for the lower graph. Some independent disparity trees (DT) are generated to form a disparity prediction forest (HDPF) over which the cost aggregation is made. When combined with the state-of-the-art tree-based methods, our scheme not only dramatically speeds up the original methods but also improves their performance by alleviating the second drawback of the tree-based methods. This is partially because our DTs overcome the extreme greediness of the MST. Extensive experimental results on some benchmark datasets demonstrate the effectiveness and efficiency of our framework. For example, the segment-tree based stereo matching becomes about 25.57 times faster and 2.2% more accurate over the Middlebury 2006 full-size dataset.