 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal Time Trajectory Prediction Using Deep Conditional Generative Models
Sep 09, 2019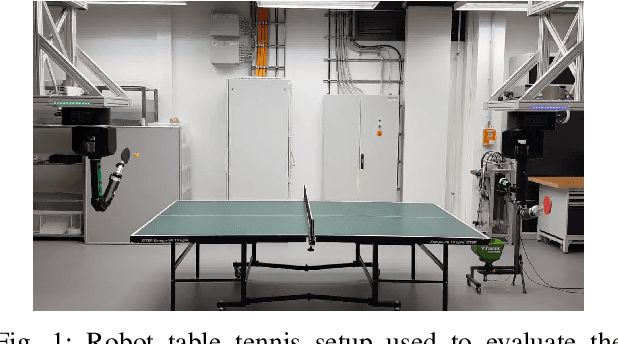
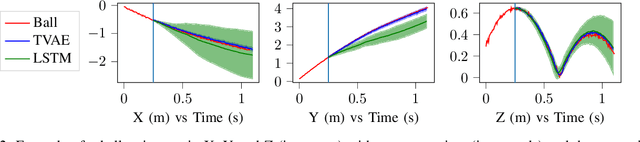
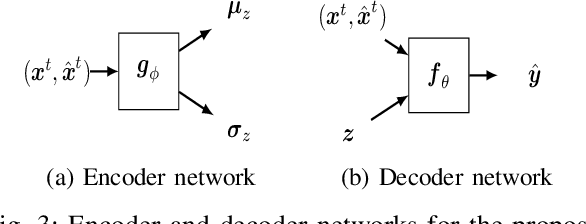
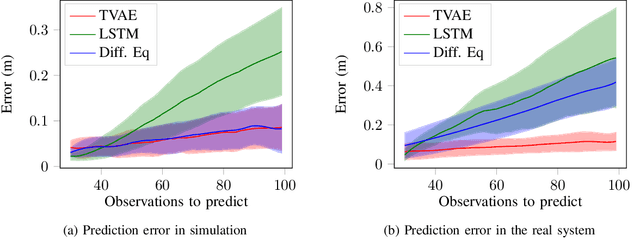
Data driven methods for time series forecasting that quantify uncertainty open new important possibilities for robot tasks with hard real time constraints, allowing the robot system to make decisions that trade off between reaction time and accuracy in the predictions. Despite the recent advances in deep learning, it is still challenging to make long term accurate predictions with the low latency required by real time robotic systems. In this paper, we propose a deep conditional generative model for trajectory prediction that is learned from a data set of collected trajectories. Our method uses an encoder and decoder deep networks that maps complete or partial trajectories to a Gaussian distributed latent space and back, allowing for fast inference of the future values of a trajectory given previous observations. The encoder and decoder networks are trained using stochastic gradient variational Bayes. In the experiments, we show that our model provides more accurate long term predictions with a lower latency that popular models for trajectory forecasting like recurrent neural networks or physical models based on differential equations. Finally, we test our proposed approach in a robot table tennis scenario to evaluate the performance of the proposed method in a robotic task with hard real time constraints.
Reliable Real Time Ball Tracking for Robot Table Tennis
Aug 20, 2019
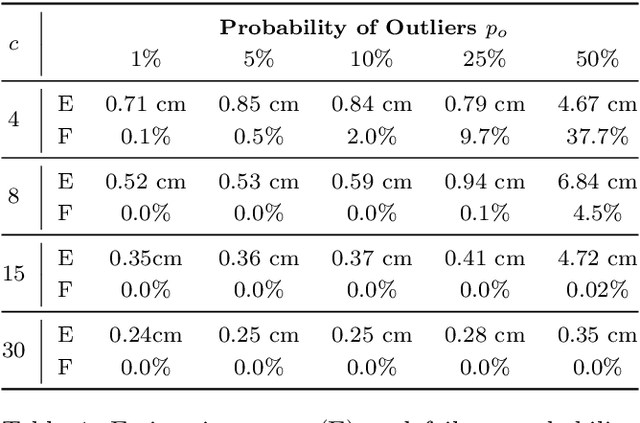
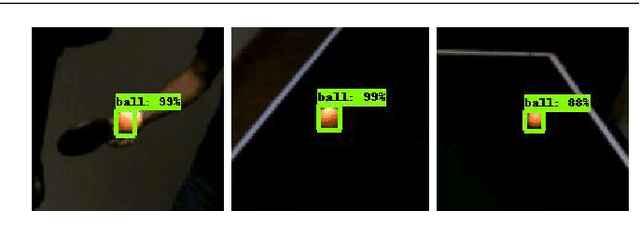
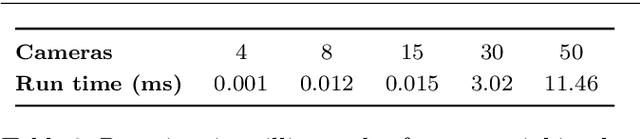
Robot table tennis systems require a vision system that can track the ball position with low latency and high sampling rate. Altering the ball to simplify the tracking using for instance infrared coating changes the physics of the ball trajectory. As a result, table tennis systems use custom tracking systems to track the ball based on heuristic algorithms respecting the real time constrains applied to RGB images captured with a set of cameras. However, these heuristic algorithms often report erroneous ball positions, and the table tennis policies typically need to incorporate additional heuristics to detect and possibly correct outliers. In this paper, we propose a vision system for object detection and tracking that focus on reliability while providing real time performance. Our assumption is that by using multiple cameras, we can find and discard the errors obtained in the object detection phase by checking for consistency with the positions reported by other cameras. We provide an open source implementation of the proposed tracking system to simplify future research in robot table tennis or related tracking applications with strong real time requirements. We evaluate the proposed system thoroughly in simulation and in the real system, outperforming previous work. Furthermore, we show that the accuracy and robustness of the proposed system increases as more cameras are added. Finally, we evaluate the table tennis playing performance of an existing method in the real robot using the proposed vision system. We measure a slight increase in performance compared to a previous vision system even after removing all the heuristics previously present to filter out erroneous ball observations.
Bayesian Online Detection and Prediction of Change Points
Feb 12, 2019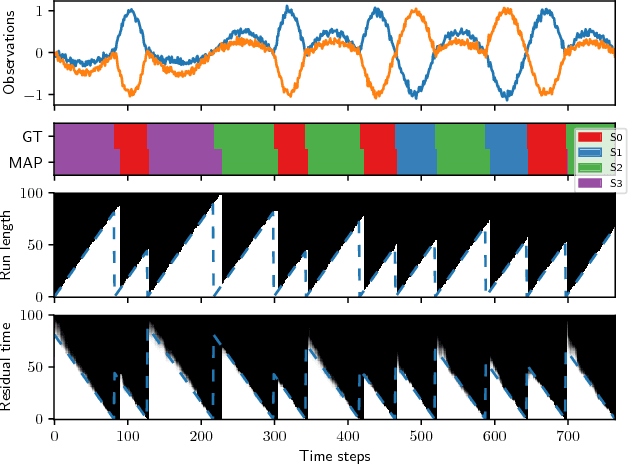
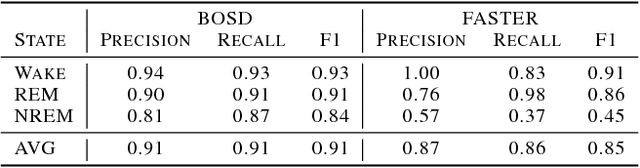
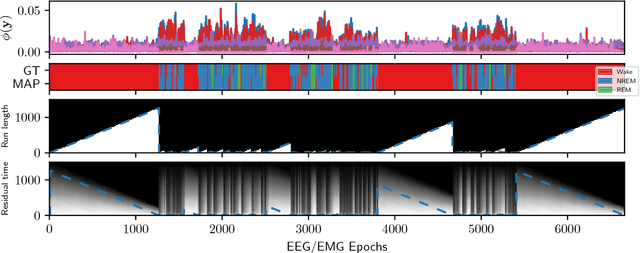
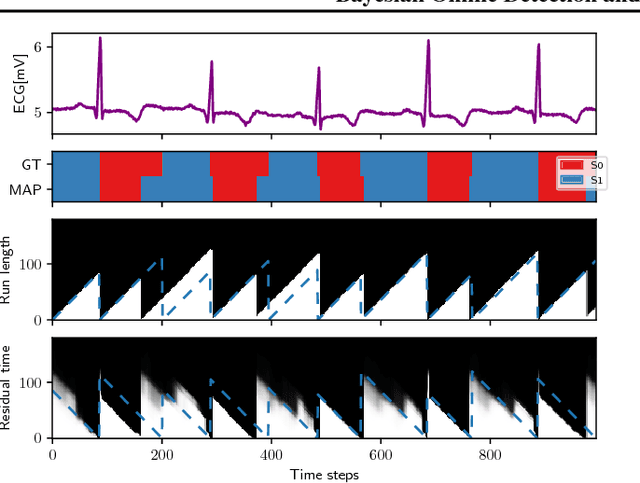
Online detection of instantaneous changes in the generative process of a data sequence generally focuses on retrospective inference of such change points without considering their future occurrences. We extend the Bayesian Online Change Point Detection algorithm to also infer the number of time steps until the next change point (i.e., the residual time). This enables us to handle observation models which depend on the total segment duration, which is useful to model data sequences with temporal scaling. In addition, we extend the model by removing the i.i.d. assumption on the observation model parameters. The resulting inference algorithm for segment detection can be deployed in an online fashion, and we illustrate applications to synthetic and to two medical real-world data sets.
Adaptation and Robust Learning of Probabilistic Movement Primitives
Aug 31, 2018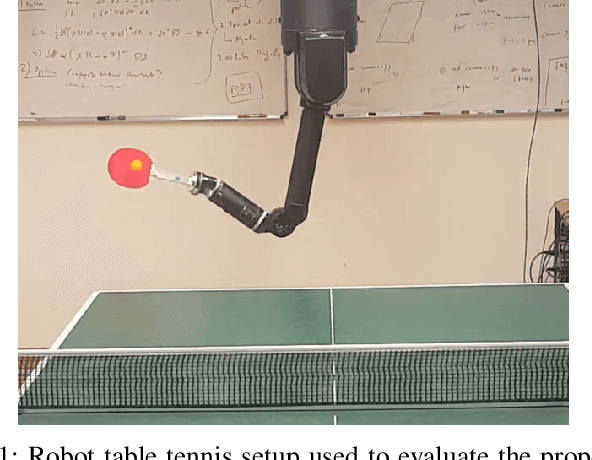
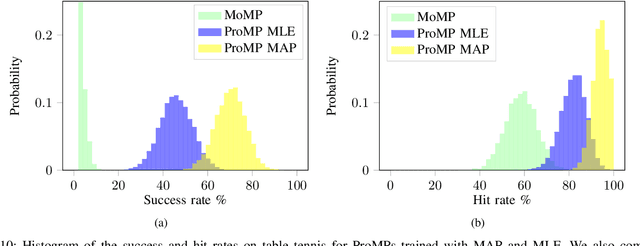
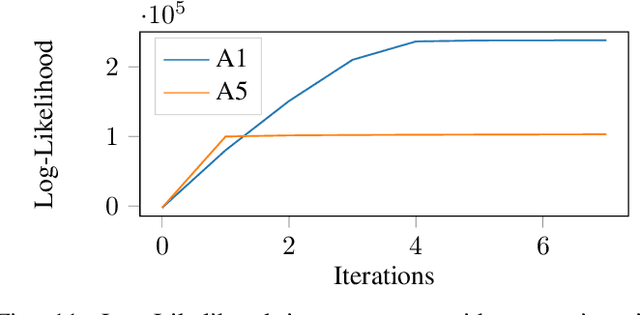
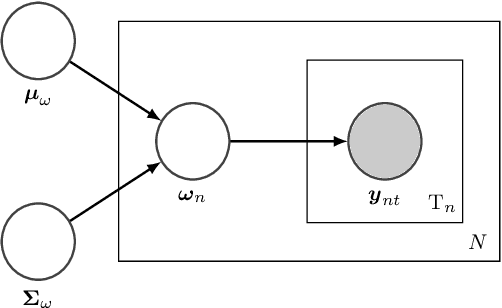
Probabilistic representations of movement primitives open important new possibilities for machine learning in robotics. These representations are able to capture the variability of the demonstrations from a teacher as a probability distribution over trajectories, providing a sensible region of exploration and the ability to adapt to changes in the robot environment. However, to be able to capture variability and correlations between different joints, a probabilistic movement primitive requires the estimation of a larger number of parameters compared to their deterministic counterparts, that focus on modeling only the mean behavior. In this paper, we make use of prior distributions over the parameters of a probabilistic movement primitive to make robust estimates of the parameters with few training instances. In addition, we introduce general purpose operators to adapt movement primitives in joint and task space. The proposed training method and adaptation operators are tested in a coffee preparation and in robot table tennis task. In the coffee preparation task we evaluate the generalization performance to changes in the location of the coffee grinder and brewing chamber in a target area, achieving the desired behavior after only two demonstrations. In the table tennis task we evaluate the hit and return rates, outperforming previous approaches while using fewer task specific heuristics.