 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOryx: a Performant and Scalable Algorithm for Many-Agent Coordination in Offline MARL
May 28, 2025A key challenge in offline multi-agent reinforcement learning (MARL) is achieving effective many-agent multi-step coordination in complex environments. In this work, we propose Oryx, a novel algorithm for offline cooperative MARL to directly address this challenge. Oryx adapts the recently proposed retention-based architecture Sable and combines it with a sequential form of implicit constraint Q-learning (ICQ), to develop a novel offline auto-regressive policy update scheme. This allows Oryx to solve complex coordination challenges while maintaining temporal coherence over lengthy trajectories. We evaluate Oryx across a diverse set of benchmarks from prior works (SMAC, RWARE, and Multi-Agent MuJoCo) covering tasks of both discrete and continuous control, varying in scale and difficulty. Oryx achieves state-of-the-art performance on more than 80% of the 65 tested datasets, outperforming prior offline MARL methods and demonstrating robust generalisation across domains with many agents and long horizons. Finally, we introduce new datasets to push the limits of many-agent coordination in offline MARL, and demonstrate Oryx's superior ability to scale effectively in such settings. We will make all of our datasets, experimental data, and code available upon publication.
Breaking the Performance Ceiling in Complex Reinforcement Learning requires Inference Strategies
May 27, 2025Reinforcement learning (RL) systems have countless applications, from energy-grid management to protein design. However, such real-world scenarios are often extremely difficult, combinatorial in nature, and require complex coordination between multiple agents. This level of complexity can cause even state-of-the-art RL systems, trained until convergence, to hit a performance ceiling which they are unable to break out of with zero-shot inference. Meanwhile, many digital or simulation-based applications allow for an inference phase that utilises a specific time and compute budget to explore multiple attempts before outputting a final solution. In this work, we show that such an inference phase employed at execution time, and the choice of a corresponding inference strategy, are key to breaking the performance ceiling observed in complex multi-agent RL problems. Our main result is striking: we can obtain up to a 126% and, on average, a 45% improvement over the previous state-of-the-art across 17 tasks, using only a couple seconds of extra wall-clock time during execution. We also demonstrate promising compute scaling properties, supported by over 60k experiments, making it the largest study on inference strategies for complex RL to date. Our experimental data and code are available at https://sites.google.com/view/inf-marl.
Performant, Memory Efficient and Scalable Multi-Agent Reinforcement Learning
Oct 02, 2024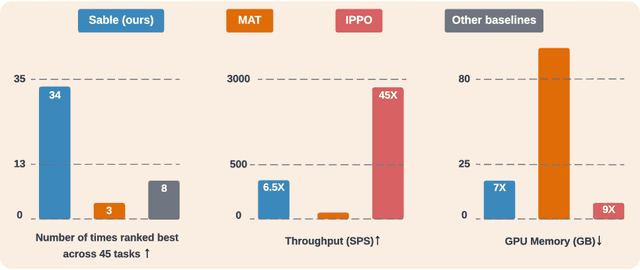
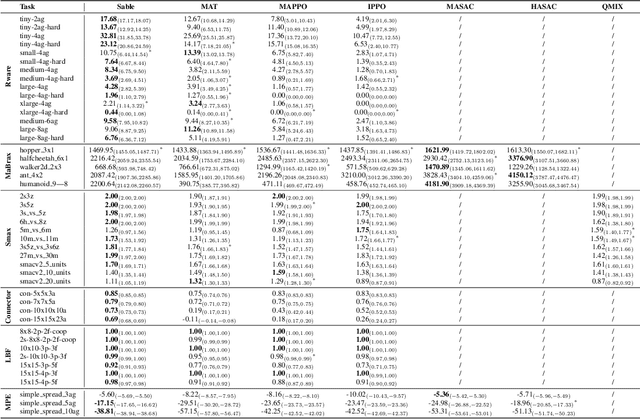

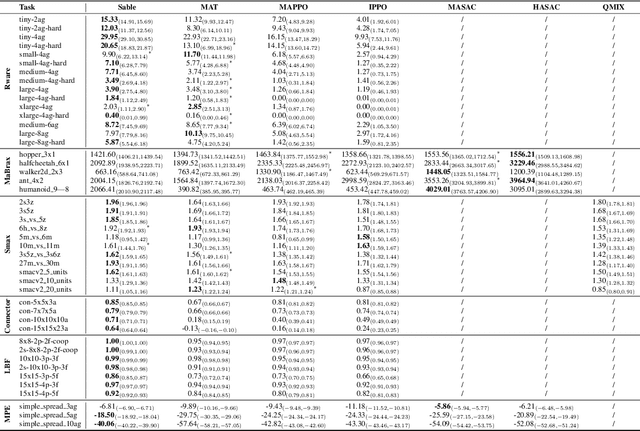
As the field of multi-agent reinforcement learning (MARL) progresses towards larger and more complex environments, achieving strong performance while maintaining memory efficiency and scalability to many agents becomes increasingly important. Although recent research has led to several advanced algorithms, to date, none fully address all of these key properties simultaneously. In this work, we introduce Sable, a novel and theoretically sound algorithm that adapts the retention mechanism from Retentive Networks to MARL. Sable's retention-based sequence modelling architecture allows for computationally efficient scaling to a large number of agents, as well as maintaining a long temporal context, making it well-suited for large-scale partially observable environments. Through extensive evaluations across six diverse environments, we demonstrate how Sable is able to significantly outperform existing state-of-the-art methods in the majority of tasks (34 out of 45, roughly 75\%). Furthermore, Sable demonstrates stable performance as we scale the number of agents, handling environments with more than a thousand agents while exhibiting a linear increase in memory usage. Finally, we conduct ablation studies to isolate the source of Sable's performance gains and confirm its efficient computational memory usage. Our results highlight Sable's performance and efficiency, positioning it as a leading approach to MARL at scale.
Generalisable Agents for Neural Network Optimisation
Nov 30, 2023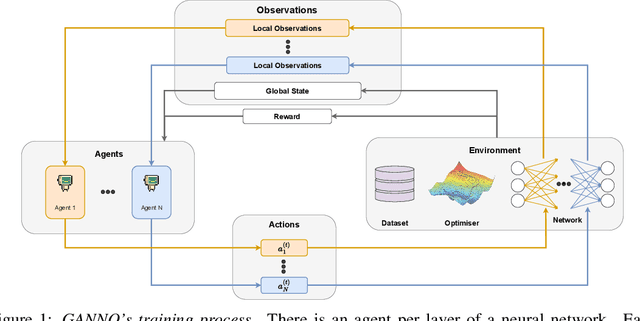
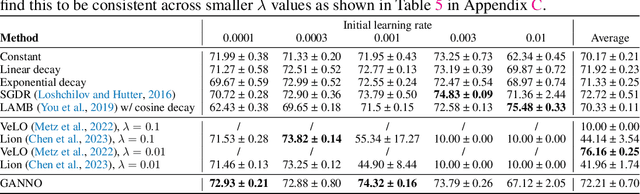
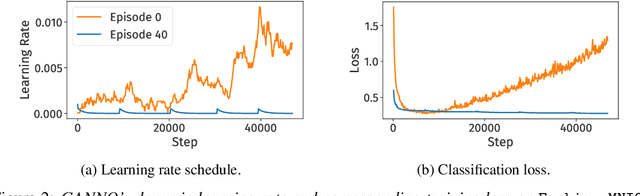

Optimising deep neural networks is a challenging task due to complex training dynamics, high computational requirements, and long training times. To address this difficulty, we propose the framework of Generalisable Agents for Neural Network Optimisation (GANNO) -- a multi-agent reinforcement learning (MARL) approach that learns to improve neural network optimisation by dynamically and responsively scheduling hyperparameters during training. GANNO utilises an agent per layer that observes localised network dynamics and accordingly takes actions to adjust these dynamics at a layerwise level to collectively improve global performance. In this paper, we use GANNO to control the layerwise learning rate and show that the framework can yield useful and responsive schedules that are competitive with handcrafted heuristics. Furthermore, GANNO is shown to perform robustly across a wide variety of unseen initial conditions, and can successfully generalise to harder problems than it was trained on. Our work presents an overview of the opportunities that this paradigm offers for training neural networks, along with key challenges that remain to be overcome.
Jumanji: a Diverse Suite of Scalable Reinforcement Learning Environments in JAX
Jun 16, 2023Open-source reinforcement learning (RL) environments have played a crucial role in driving progress in the development of AI algorithms. In modern RL research, there is a need for simulated environments that are performant, scalable, and modular to enable their utilization in a wider range of potential real-world applications. Therefore, we present Jumanji, a suite of diverse RL environments specifically designed to be fast, flexible, and scalable. Jumanji provides a suite of environments focusing on combinatorial problems frequently encountered in industry, as well as challenging general decision-making tasks. By leveraging the efficiency of JAX and hardware accelerators like GPUs and TPUs, Jumanji enables rapid iteration of research ideas and large-scale experimentation, ultimately empowering more capable agents. Unlike existing RL environment suites, Jumanji is highly customizable, allowing users to tailor the initial state distribution and problem complexity to their needs. Furthermore, we provide actor-critic baselines for each environment, accompanied by preliminary findings on scaling and generalization scenarios. Jumanji aims to set a new standard for speed, adaptability, and scalability of RL environments.