 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed-Initiative Human-Robot Teaming under Suboptimality with Online Bayesian Adaptation
Mar 24, 2024For effective human-agent teaming, robots and other artificial intelligence (AI) agents must infer their human partner's abilities and behavioral response patterns and adapt accordingly. Most prior works make the unrealistic assumption that one or more teammates can act near-optimally. In real-world collaboration, humans and autonomous agents can be suboptimal, especially when each only has partial domain knowledge. In this work, we develop computational modeling and optimization techniques for enhancing the performance of suboptimal human-agent teams, where the human and the agent have asymmetric capabilities and act suboptimally due to incomplete environmental knowledge. We adopt an online Bayesian approach that enables a robot to infer people's willingness to comply with its assistance in a sequential decision-making game. Our user studies show that user preferences and team performance indeed vary with robot intervention styles, and our approach for mixed-initiative collaborations enhances objective team performance ($p<.001$) and subjective measures, such as user's trust ($p<.001$) and perceived likeability of the robot ($p<.001$).
Gesticulator: A framework for semantically-aware speech-driven gesture generation
Jan 25, 2020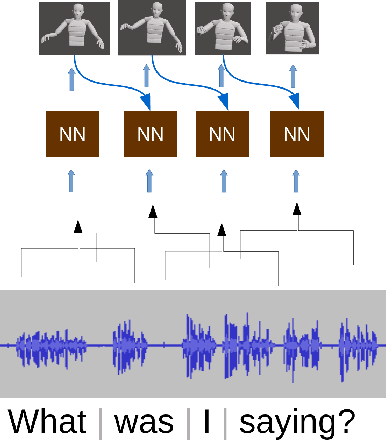
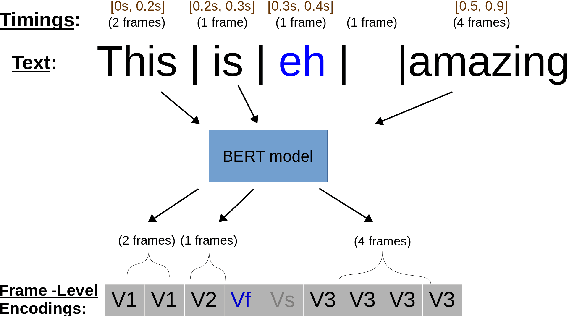
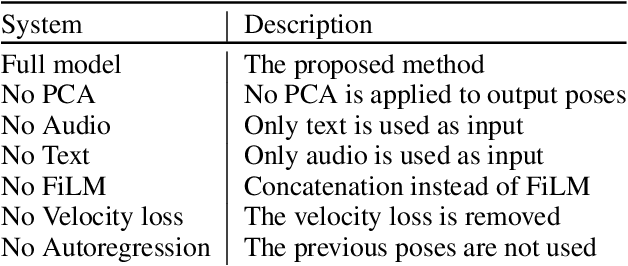
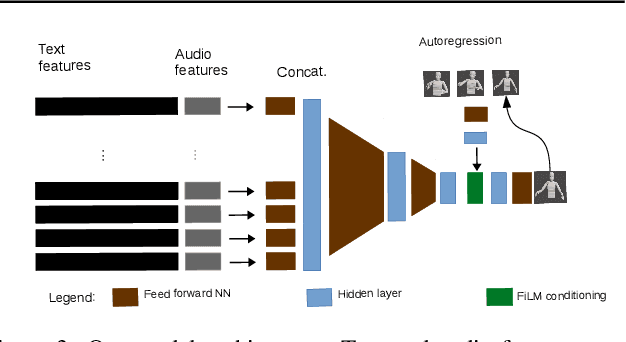
During speech, people spontaneously gesticulate, which plays a key role in conveying information. Similarly, realistic co-speech gestures are crucial to enable natural and smooth interactions with social agents. Current data-driven co-speech gesture generation systems use a single modality for representing speech: either audio or text. These systems are therefore confined to producing either acoustically-linked beat gestures or semantically-linked gesticulation (e.g., raising a hand when saying ``high''): they cannot appropriately learn to generate both gesture types. We present a model designed to produce arbitrary beat and semantic gestures together. Our deep-learning based model takes both acoustic and semantic representations of speech as input, and generates gestures as a sequence of joint angle rotations as output. The resulting gestures can be applied to both virtual agents and humanoid robots. We illustrate the model's efficacy with subjective and objective evaluations.