 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeGrasp: Zero-Shot Task-Oriented Grasping with Large Language Models through Geometric Decomposition
Mar 26, 2024Task-oriented grasping of unfamiliar objects is a necessary skill for robots in dynamic in-home environments. Inspired by the human capability to grasp such objects through intuition about their shape and structure, we present a novel zero-shot task-oriented grasping method leveraging a geometric decomposition of the target object into simple, convex shapes that we represent in a graph structure, including geometric attributes and spatial relationships. Our approach employs minimal essential information - the object's name and the intended task - to facilitate zero-shot task-oriented grasping. We utilize the commonsense reasoning capabilities of large language models to dynamically assign semantic meaning to each decomposed part and subsequently reason over the utility of each part for the intended task. Through extensive experiments on a real-world robotics platform, we demonstrate that our grasping approach's decomposition and reasoning pipeline is capable of selecting the correct part in 92% of the cases and successfully grasping the object in 82% of the tasks we evaluate. Additional videos, experiments, code, and data are available on our project website: https://shapegrasp.github.io/.
Personalized Colorectal Cancer Survivability Prediction with Machine Learning Methods
Jan 12, 2019
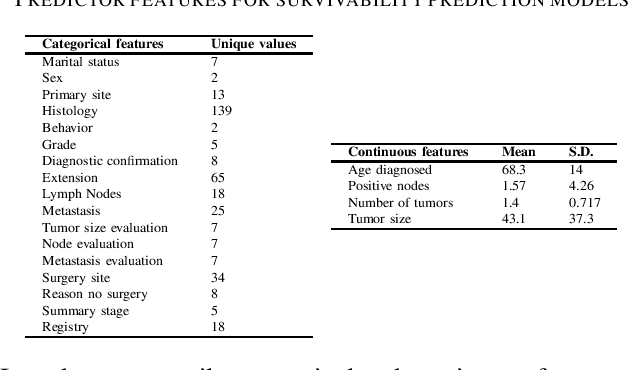
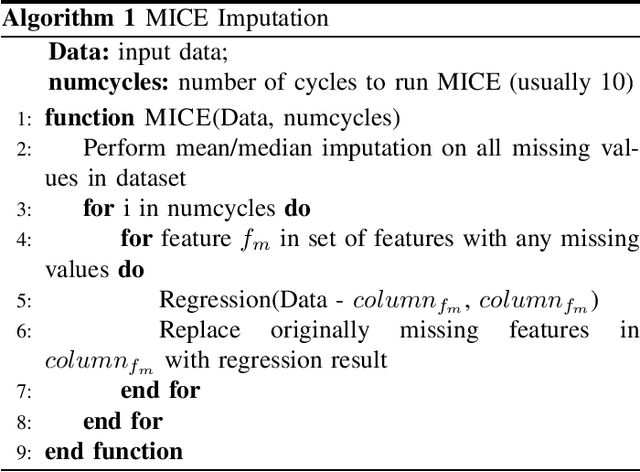
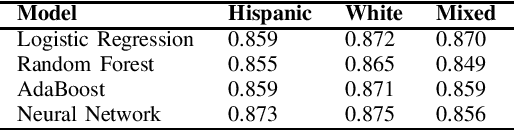
In this work, we investigate the importance of ethnicity in colorectal cancer survivability prediction using machine learning techniques and the SEER cancer incidence database. We compare model performances for 2-year survivability prediction and feature importance rankings between Hispanic, White, and mixed patient populations. Our models consistently perform better on single-ethnicity populations and provide different feature importance rankings when trained in different populations. Additionally, we show our models achieve higher Area Under Curve (AUC) score than the best reported in the literature. We also apply imbalanced classification techniques to improve classification performance when the number of patients who have survived from colorectal cancer is much larger than who have not. These results provide evidence in favor for increased consideration of patient ethnicity in cancer survivability prediction, and for more personalized medicine in general.
Context-Independent Polyphonic Piano Onset Transcription with an Infinite Training Dataset
Jul 26, 2017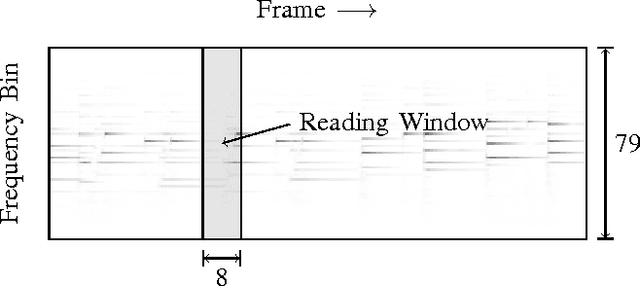
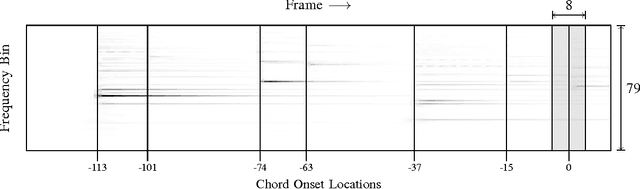
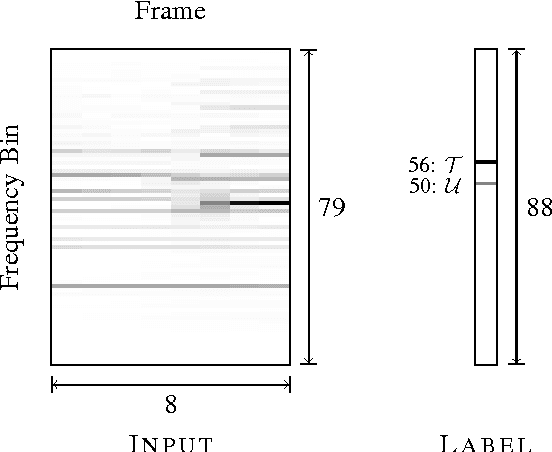
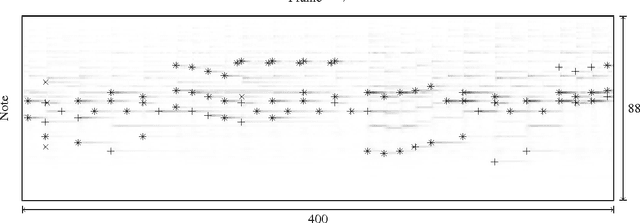
Many of the recent approaches to polyphonic piano note onset transcription require training a machine learning model on a large piano database. However, such approaches are limited by dataset availability; additional training data is difficult to produce, and proposed systems often perform poorly on novel recording conditions. We propose a method to quickly synthesize arbitrary quantities of training data, avoiding the need for curating large datasets. Various aspects of piano note dynamics - including nonlinearity of note signatures with velocity, different articulations, temporal clustering of onsets, and nonlinear note partial interference - are modeled to match the characteristics of real pianos. Our method also avoids the disentanglement problem, a recently noted issue affecting machine-learning based approaches. We train a feed-forward neural network with two hidden layers on our generated training data and achieve both good transcription performance on the large MAPS piano dataset and excellent generalization qualities.