 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Federated Channel Modeling System using Generative Neural Networks
May 30, 2023The paper proposes a data-driven approach to air-to-ground channel estimation in a millimeter-wave wireless network on an unmanned aerial vehicle. Unlike traditional centralized learning methods that are specific to certain geographical areas and inappropriate for others, we propose a generalized model that uses Federated Learning (FL) for channel estimation and can predict the air-to-ground path loss between a low-altitude platform and a terrestrial terminal. To this end, our proposed FL-based Generative Adversarial Network (FL-GAN) is designed to function as a generative data model that can learn different types of data distributions and generate realistic patterns from the same distributions without requiring prior data analysis before the training phase. To evaluate the effectiveness of the proposed model, we evaluate its performance using Kullback-Leibler divergence (KL), and Wasserstein distance between the synthetic data distribution generated by the model and the actual data distribution. We also compare the proposed technique with other generative models, such as FL-Variational Autoencoder (FL-VAE) and stand-alone VAE and GAN models. The results of the study show that the synthetic data generated by FL-GAN has the highest similarity in distribution with the real data. This shows the effectiveness of the proposed approach in generating data-driven channel models that can be used in different regions
How Generative Models Improve LOS Estimation in 6G Non-Terrestrial Networks
May 30, 2023



With the advent of 5G and the anticipated arrival of 6G, there has been a growing research interest in combining mobile networks with Non-Terrestrial Network platforms such as low earth orbit satellites and Geosynchronous Equatorial Orbit satellites to provide broader coverage for a wide range of applications. However, integrating these platforms is challenging because Line-Of-Sight (LOS) estimation is required for both inter satellite and satellite-to-terrestrial segment links. Machine Learning (ML) techniques have shown promise in channel modeling and LOS estimation, but they require large datasets for model training, which can be difficult to obtain. In addition, network operators may be reluctant to disclose their network data due to privacy concerns. Therefore, alternative data collection techniques are needed. In this paper, a framework is proposed that uses generative models to generate synthetic data for LOS estimation in non-terrestrial 6G networks. Specifically, the authors show that generative models can be trained with a small available dataset to generate large datasets that can be used to train ML models for LOS estimation. Furthermore, since the generated synthetic data does not contain identifying information of the original dataset, it can be made publicly available without violating privacy
Federated Semi-Supervised Classification of Multimedia Flows for 3D Networks
May 01, 2022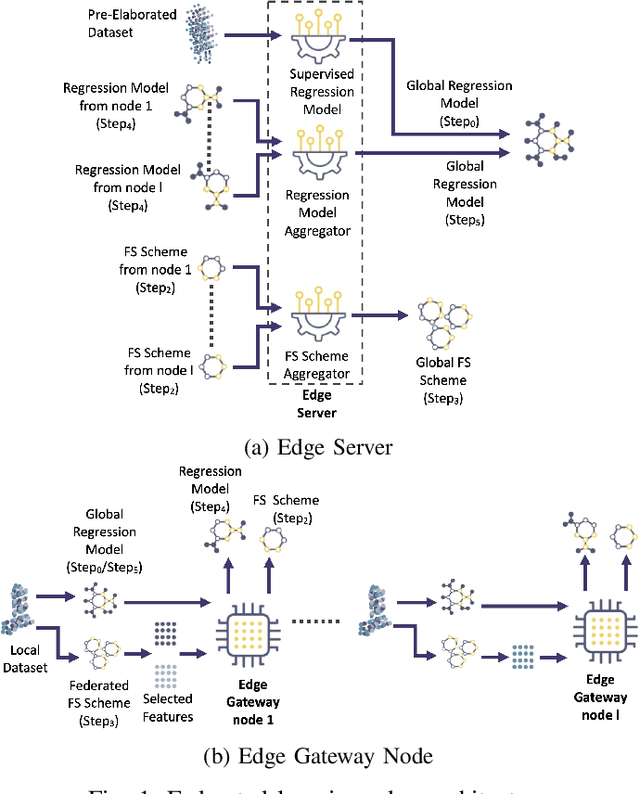
Automatic traffic classification is increasingly becoming important in traffic engineering, as the current trend of encrypting transport information (e.g., behind HTTP-encrypted tunnels) prevents intermediate nodes from accessing end-to-end packet headers. However, this information is crucial for traffic shaping, network slicing, and Quality of Service (QoS) management, for preventing network intrusion, and for anomaly detection. 3D networks offer multiple routes that can guarantee different levels of QoS. Therefore, service classification and separation are essential to guarantee the required QoS level to each traffic sub-flow through the appropriate network trunk. In this paper, a federated feature selection and feature reduction learning scheme is proposed to classify network traffic in a semi-supervised cooperative manner. The federated gateways of 3D network help to enhance the global knowledge of network traffic to improve the accuracy of anomaly and intrusion detection and service identification of a new traffic flow.
AI-as-a-Service Toolkit for Human-Centered Intelligence in Autonomous Driving
Feb 09, 2022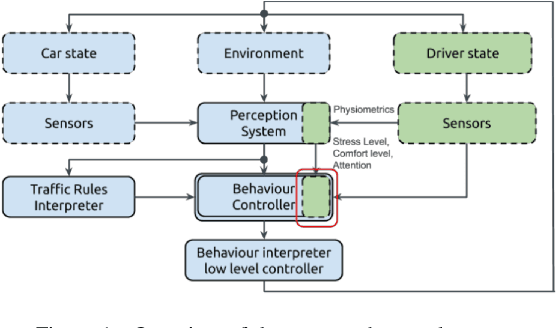
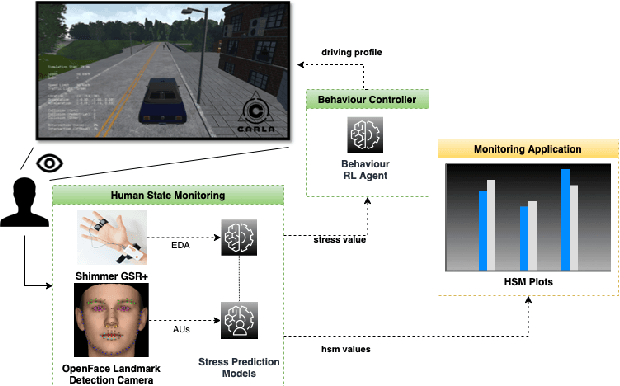
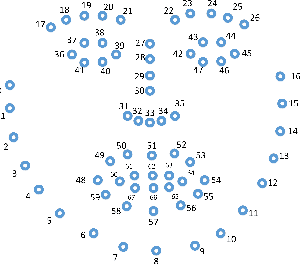
This paper presents a proof-of-concept implementation of the AI-as-a-Service toolkit developed within the H2020 TEACHING project and designed to implement an autonomous driving personalization system according to the output of an automatic driver's stress recognition algorithm, both of them realizing a Cyber-Physical System of Systems. In addition, we implemented a data-gathering subsystem to collect data from different sensors, i.e., wearables and cameras, to automatize stress recognition. The system was attached for testing to a driving simulation software, CARLA, which allows testing the approach's feasibility with minimum cost and without putting at risk drivers and passengers. At the core of the relative subsystems, different learning algorithms were implemented using Deep Neural Networks, Recurrent Neural Networks, and Reinforcement Learning.