 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Hyperparameter Optimization for Continual Learning Scenarios
Mar 09, 2024



Hyperparameter selection in continual learning scenarios is a challenging and underexplored aspect, especially in practical non-stationary environments. Traditional approaches, such as grid searches with held-out validation data from all tasks, are unrealistic for building accurate lifelong learning systems. This paper aims to explore the role of hyperparameter selection in continual learning and the necessity of continually and automatically tuning them according to the complexity of the task at hand. Hence, we propose leveraging the nature of sequence task learning to improve Hyperparameter Optimization efficiency. By using the functional analysis of variance-based techniques, we identify the most crucial hyperparameters that have an impact on performance. We demonstrate empirically that this approach, agnostic to continual scenarios and strategies, allows us to speed up hyperparameters optimization continually across tasks and exhibit robustness even in the face of varying sequential task orders. We believe that our findings can contribute to the advancement of continual learning methodologies towards more efficient, robust and adaptable models for real-world applications.
Continual Learning for Predictive Maintenance: Overview and Challenges
Jan 29, 2023



Machine learning techniques have become one of the main propellers for solving many engineering problems effectively and efficiently. In Predictive Maintenance, for instance, Data-Driven methods have been used to improve predictions of when maintenance is needed on different machines and operative contexts. However, one of the limitations of these methods is that they are trained on a fixed distribution that does not change over time, which seldom happens in real-world applications. When internal or external factors alter the data distribution, the model performance may decrease or even fail unpredictably, resulting in severe consequences for machine maintenance. Continual Learning methods propose ways of adapting prediction models and incorporating new knowledge after deployment. The main objective of these methods is to avoid the plasticity-stability dilemma by updating the parametric model while not forgetting previously learned tasks. In this work, we present the current state of the art in applying Continual Learning to Predictive Maintenance, with an extensive review of both disciplines. We first introduce the two research themes independently, then discuss the current intersection of Continual Learning and Predictive Maintenance. Finally, we discuss the main research directions and conclusions.
Continual-Learning-as-a-Service : On-Demand Efficient Adaptation of Predictive Models
Jun 14, 2022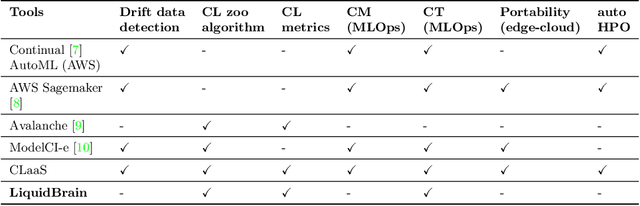
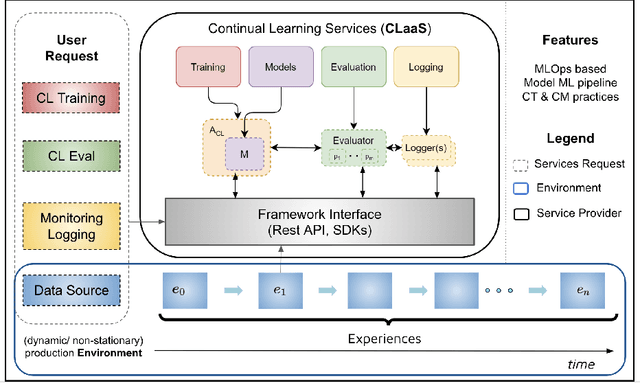
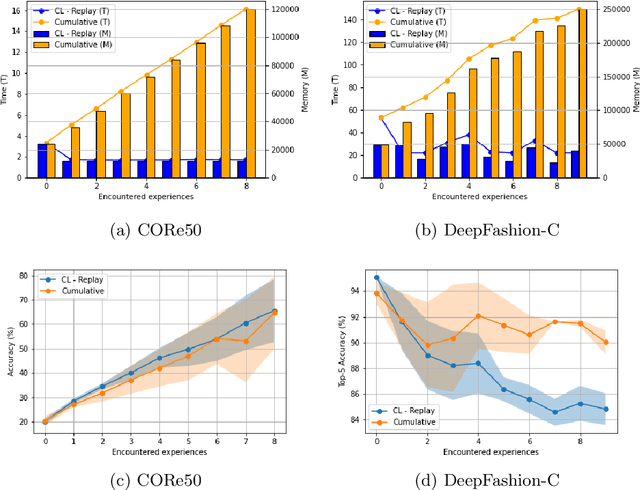
Predictive machine learning models nowadays are often updated in a stateless and expensive way. The two main future trends for companies that want to build machine learning-based applications and systems are real-time inference and continual updating. Unfortunately, both trends require a mature infrastructure that is hard and costly to realize on-premise. This paper defines a novel software service and model delivery infrastructure termed Continual Learning-as-a-Service (CLaaS) to address these issues. Specifically, it embraces continual machine learning and continuous integration techniques. It provides support for model updating and validation tools for data scientists without an on-premise solution and in an efficient, stateful and easy-to-use manner. Finally, this CL model service is easy to encapsulate in any machine learning infrastructure or cloud system. This paper presents the design and implementation of a CLaaS instantiation, called LiquidBrain, evaluated in two real-world scenarios. The former is a robotic object recognition setting using the CORe50 dataset while the latter is a named category and attribute prediction using the DeepFashion-C dataset in the fashion domain. Our preliminary results suggest the usability and efficiency of the Continual Learning model services and the effectiveness of the solution in addressing real-world use-cases regardless of where the computation happens in the continuum Edge-Cloud.
AI-as-a-Service Toolkit for Human-Centered Intelligence in Autonomous Driving
Feb 09, 2022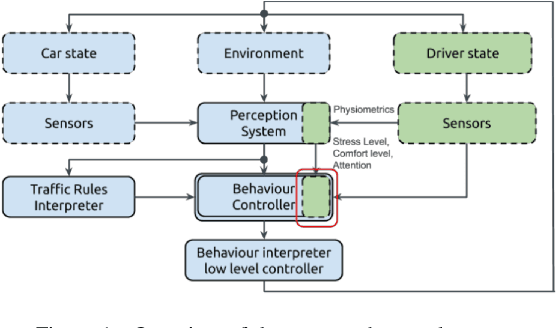
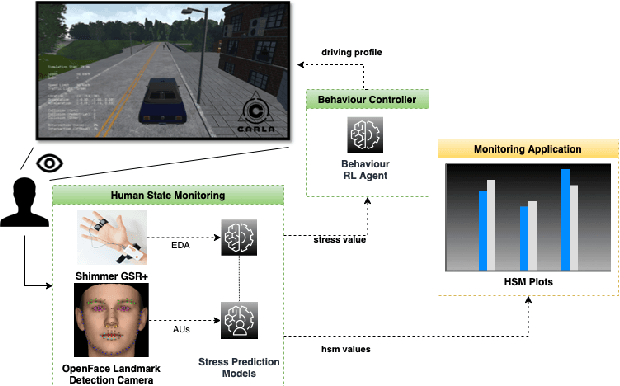
This paper presents a proof-of-concept implementation of the AI-as-a-Service toolkit developed within the H2020 TEACHING project and designed to implement an autonomous driving personalization system according to the output of an automatic driver's stress recognition algorithm, both of them realizing a Cyber-Physical System of Systems. In addition, we implemented a data-gathering subsystem to collect data from different sensors, i.e., wearables and cameras, to automatize stress recognition. The system was attached for testing to a driving simulation software, CARLA, which allows testing the approach's feasibility with minimum cost and without putting at risk drivers and passengers. At the core of the relative subsystems, different learning algorithms were implemented using Deep Neural Networks, Recurrent Neural Networks, and Reinforcement Learning.