 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTargeting World Models to Compromise Robot Learning Pipelines
Jun 08, 2026World models have recently seen a rapid growth in both their popularity and capability as more data efficient tools for generating robot training data or simulating real world environments, with many works proposing their integration into the robot learning pipeline. While highly practical, in this work we demonstrate that world models introduce a uniquely stealthy and effective data poisoning entry point into the robot learning supply chain that can result in the deployment of unsafe or otherwise compromised robotic policies despite training on seemingly safe ground truth training data. In contrast to traditional data poisoning techniques which directly implant dangerous trajectories into sold or uploaded datasets, our novel attack methods inject malicious prompts or compromising transition dynamics into visibly safe teleoperated datasets which are only activated once fed through a world model as input. This can result in the generation of synthetic, dangerous robot training trajectories and subsequently unsafe or compromised robot policies. We demonstrate the effectiveness of our attacks against both state of the art action conditioned and text conditioned world models, showing a full end-to-end backdoor on a downstream DRL policy and a proof-of-concept for the VLA setting. Overall these findings necessitate research into more secure world models and reevaluating their position within the robot learning supply chain.
Colosseum: Auditing Collusion in Cooperative Multi-Agent Systems
Feb 16, 2026Multi-agent systems, where LLM agents communicate through free-form language, enable sophisticated coordination for solving complex cooperative tasks. This surfaces a unique safety problem when individual agents form a coalition and \emph{collude} to pursue secondary goals and degrade the joint objective. In this paper, we present Colosseum, a framework for auditing LLM agents' collusive behavior in multi-agent settings. We ground how agents cooperate through a Distributed Constraint Optimization Problem (DCOP) and measure collusion via regret relative to the cooperative optimum. Colosseum tests each LLM for collusion under different objectives, persuasion tactics, and network topologies. Through our audit, we show that most out-of-the-box models exhibited a propensity to collude when a secret communication channel was artificially formed. Furthermore, we discover ``collusion on paper'' when agents plan to collude in text but would often pick non-collusive actions, thus providing little effect on the joint task. Colosseum provides a new way to study collusion by measuring communications and actions in rich yet verifiable environments.
Verification Required: The Impact of Information Credibility on AI Persuasion
Feb 01, 2026Agents powered by large language models (LLMs) are increasingly deployed in settings where communication shapes high-stakes decisions, making a principled understanding of strategic communication essential. Prior work largely studies either unverifiable cheap-talk or fully verifiable disclosure, failing to capture realistic domains in which information has probabilistic credibility. We introduce MixTalk, a strategic communication game for LLM-to-LLM interaction that models information credibility. In MixTalk, a sender agent strategically combines verifiable and unverifiable claims to communicate private information, while a receiver agent allocates a limited budget to costly verification and infers the underlying state from prior beliefs, claims, and verification outcomes. We evaluate state-of-the-art LLM agents in large-scale tournaments across three realistic deployment settings, revealing their strengths and limitations in reasoning about information credibility and the explicit behavior that shapes these interactions. Finally, we propose Tournament Oracle Policy Distillation (TOPD), an offline method that distills tournament oracle policy from interaction logs and deploys it in-context at inference time. Our results show that TOPD significantly improves receiver robustness to persuasion.
Terrarium: Revisiting the Blackboard for Multi-Agent Safety, Privacy, and Security Studies
Oct 16, 2025A multi-agent system (MAS) powered by large language models (LLMs) can automate tedious user tasks such as meeting scheduling that requires inter-agent collaboration. LLMs enable nuanced protocols that account for unstructured private data, user constraints, and preferences. However, this design introduces new risks, including misalignment and attacks by malicious parties that compromise agents or steal user data. In this paper, we propose the Terrarium framework for fine-grained study on safety, privacy, and security in LLM-based MAS. We repurpose the blackboard design, an early approach in multi-agent systems, to create a modular, configurable testbed for multi-agent collaboration. We identify key attack vectors such as misalignment, malicious agents, compromised communication, and data poisoning. We implement three collaborative MAS scenarios with four representative attacks to demonstrate the framework's flexibility. By providing tools to rapidly prototype, evaluate, and iterate on defenses and designs, Terrarium aims to accelerate progress toward trustworthy multi-agent systems.
Aligning LLMs on a Budget: Inference-Time Alignment with Heuristic Reward Models
Aug 07, 2025



Aligning LLMs with user preferences is crucial for real-world use but often requires costly fine-tuning or expensive inference, forcing trade-offs between alignment quality and computational cost. Existing inference-time methods typically ignore this balance, focusing solely on the optimized policy's performance. We propose HIA (Heuristic-Guided Inference-time Alignment), a tuning-free, black-box-compatible approach that uses a lightweight prompt optimizer, heuristic reward models, and two-stage filtering to reduce inference calls while preserving alignment quality. On real-world prompt datasets, HelpSteer and ComPRed, HIA outperforms best-of-N sampling, beam search, and greedy search baselines in multi-objective, goal-conditioned tasks under the same inference budget. We also find that HIA is effective under low-inference budgets with as little as one or two response queries, offering a practical solution for scalable, personalized LLM deployment.
Distributed Multi-Agent Coordination Using Multi-Modal Foundation Models
Jan 24, 2025



Distributed Constraint Optimization Problems (DCOPs) offer a powerful framework for multi-agent coordination but often rely on labor-intensive, manual problem construction. To address this, we introduce VL-DCOPs, a framework that takes advantage of large multimodal foundation models (LFMs) to automatically generate constraints from both visual and linguistic instructions. We then introduce a spectrum of agent archetypes for solving VL-DCOPs: from a neuro-symbolic agent that delegates some of the algorithmic decisions to an LFM, to a fully neural agent that depends entirely on an LFM for coordination. We evaluate these agent archetypes using state-of-the-art LLMs (large language models) and VLMs (vision language models) on three novel VL-DCOP tasks and compare their respective advantages and drawbacks. Lastly, we discuss how this work extends to broader frontier challenges in the DCOP literature.
MAPLE: A Framework for Active Preference Learning Guided by Large Language Models
Dec 10, 2024



The advent of large language models (LLMs) has sparked significant interest in using natural language for preference learning. However, existing methods often suffer from high computational burdens, taxing human supervision, and lack of interpretability. To address these issues, we introduce MAPLE, a framework for large language model-guided Bayesian active preference learning. MAPLE leverages LLMs to model the distribution over preference functions, conditioning it on both natural language feedback and conventional preference learning feedback, such as pairwise trajectory rankings. MAPLE also employs active learning to systematically reduce uncertainty in this distribution and incorporates a language-conditioned active query selection mechanism to identify informative and easy-to-answer queries, thus reducing human burden. We evaluate MAPLE's sample efficiency and preference inference quality across two benchmarks, including a real-world vehicle route planning benchmark using OpenStreetMap data. Our results demonstrate that MAPLE accelerates the learning process and effectively improves humans' ability to answer queries.
A Unifying Framework for Causal Explanation of Sequential Decision Making
May 30, 2022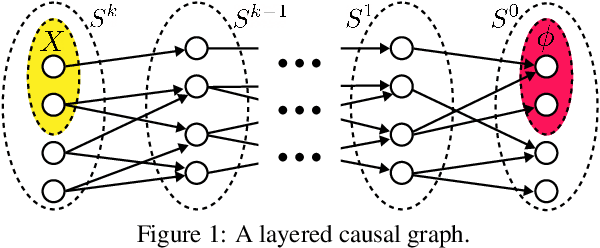

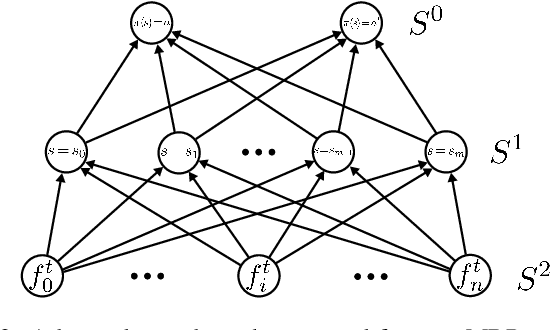
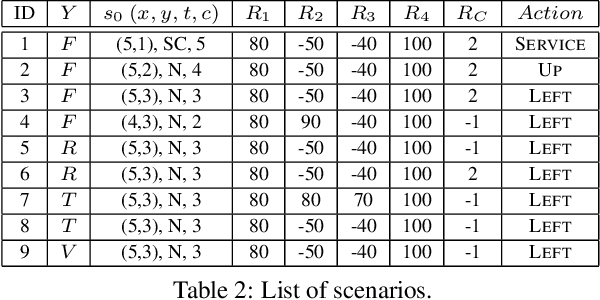
We present a novel framework for causal explanations of stochastic, sequential decision-making systems. Building on the well-studied structural causal model paradigm for causal reasoning, we show how to identify semantically distinct types of explanations for agent actions using a single unified approach. We provide results on the generality of this framework, run time bounds, and offer several approximate techniques. Finally, we discuss several qualitative scenarios that illustrate the framework's flexibility and efficacy.
Learning Cooperation and Online Planning Through Simulation and Graph Convolutional Network
Oct 16, 2021



Multi-agent Markov Decision Process (MMDP) has been an effective way of modelling sequential decision making algorithms for multi-agent cooperative environments. A number of algorithms based on centralized and decentralized planning have been developed in this domain. However, dynamically changing environment, coupled with exponential size of the state and joint action space, make it difficult for these algorithms to provide both efficiency and scalability. Recently, Centralized planning algorithm FV-MCTS-MP and decentralized planning algorithm \textit{Alternate maximization with Behavioural Cloning} (ABC) have achieved notable performance in solving MMDPs. However, they are not capable of adapting to dynamically changing environments and accounting for the lack of communication among agents, respectively. Against this background, we introduce a simulation based online planning algorithm, that we call SiCLOP, for multi-agent cooperative environments. Specifically, SiCLOP tailors Monte Carlo Tree Search (MCTS) and uses Coordination Graph (CG) and Graph Neural Network (GCN) to learn cooperation and provides real time solution of a MMDP problem. It also improves scalability through an effective pruning of action space. Additionally, unlike FV-MCTS-MP and ABC, SiCLOP supports transfer learning, which enables learned agents to operate in different environments. We also provide theoretical discussion about the convergence property of our algorithm within the context of multi-agent settings. Finally, our extensive empirical results show that SiCLOP significantly outperforms the state-of-the-art online planning algorithms.
On Population-Based Algorithms for Distributed Constraint Optimization Problems
Sep 02, 2020Distributed Constraint Optimization Problems (DCOPs) are a widely studied class of optimization problems in which interaction between a set of cooperative agents are modeled as a set of constraints. DCOPs are NP-hard and significant effort has been devoted to developing methods for finding incomplete solutions. In this paper, we study an emerging class of such incomplete algorithms that are broadly termed as population-based algorithms. The main characteristic of these algorithms is that they maintain a population of candidate solutions of a given problem and use this population to cover a large area of the search space and to avoid local-optima. In recent years, this class of algorithms has gained significant attention due to their ability to produce high-quality incomplete solutions. With the primary goal of further improving the quality of solutions compared to the state-of-the-art incomplete DCOP algorithms, we present two new population-based algorithms in this paper. Our first approach, Anytime Evolutionary DCOP or AED, exploits evolutionary optimization meta-heuristics to solve DCOPs. We also present a novel anytime update mechanism that gives AED its anytime property. While in our second contribution, we show that population-based approaches can be combined with local search approaches. Specifically, we develop an algorithm called DPSA based on the Simulated Annealing meta-heuristic. We empirically evaluate these two algorithms to illustrate their respective effectiveness in different settings against the state-of-the-art incomplete DCOP algorithms including all existing population-based algorithms in a wide variety of benchmarks. Our evaluation shows AED and DPSA markedly outperform the state-of-the-art and produce up to 75% improved solutions.