 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRL$^3$: Boosting Meta Reinforcement Learning via RL inside RL$^2$
Jun 28, 2023



Meta reinforcement learning (meta-RL) methods such as RL$^2$ have emerged as promising approaches for learning data-efficient RL algorithms tailored to a given task distribution. However, these RL algorithms struggle with long-horizon tasks and out-of-distribution tasks since they rely on recurrent neural networks to process the sequence of experiences instead of summarizing them into general RL components such as value functions. Moreover, even transformers have a practical limit to the length of histories they can efficiently reason about before training and inference costs become prohibitive. In contrast, traditional RL algorithms are data-inefficient since they do not leverage domain knowledge, but they do converge to an optimal policy as more data becomes available. In this paper, we propose RL$^3$, a principled hybrid approach that combines traditional RL and meta-RL by incorporating task-specific action-values learned through traditional RL as an input to the meta-RL neural network. We show that RL$^3$ earns greater cumulative reward on long-horizon and out-of-distribution tasks compared to RL$^2$, while maintaining the efficiency of the latter in the short term. Experiments are conducted on both custom and benchmark discrete domains from the meta-RL literature that exhibit a range of short-term, long-term, and complex dependencies.
Fairness and Sequential Decision Making: Limits, Lessons, and Opportunities
Jan 13, 2023As automated decision making and decision assistance systems become common in everyday life, research on the prevention or mitigation of potential harms that arise from decisions made by these systems has proliferated. However, various research communities have independently conceptualized these harms, envisioned potential applications, and proposed interventions. The result is a somewhat fractured landscape of literature focused generally on ensuring decision-making algorithms "do the right thing". In this paper, we compare and discuss work across two major subsets of this literature: algorithmic fairness, which focuses primarily on predictive systems, and ethical decision making, which focuses primarily on sequential decision making and planning. We explore how each of these settings has articulated its normative concerns, the viability of different techniques for these different settings, and how ideas from each setting may have utility for the other.
A Unifying Framework for Causal Explanation of Sequential Decision Making
May 30, 2022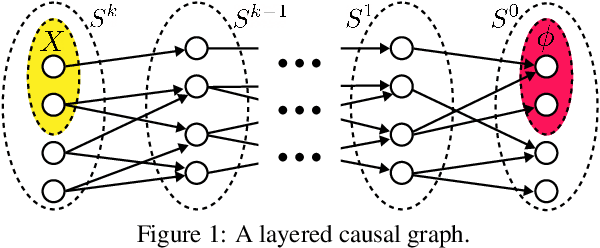

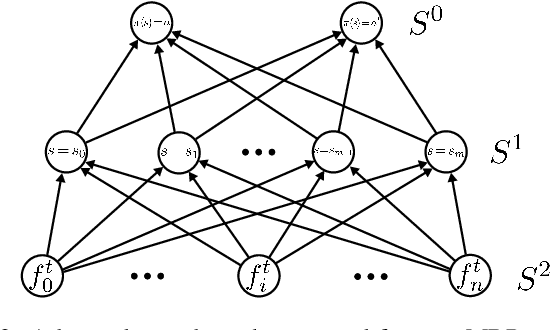
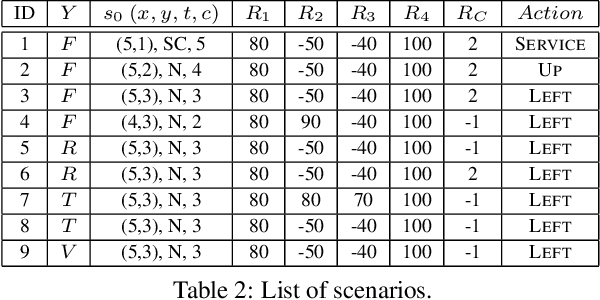
We present a novel framework for causal explanations of stochastic, sequential decision-making systems. Building on the well-studied structural causal model paradigm for causal reasoning, we show how to identify semantically distinct types of explanations for agent actions using a single unified approach. We provide results on the generality of this framework, run time bounds, and offer several approximate techniques. Finally, we discuss several qualitative scenarios that illustrate the framework's flexibility and efficacy.
Laser2Vec: Similarity-based Retrieval for Robotic Perception Data
Jul 30, 2020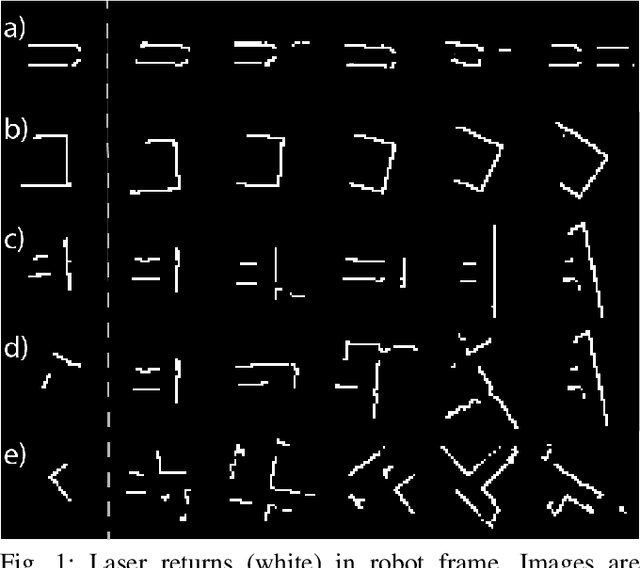
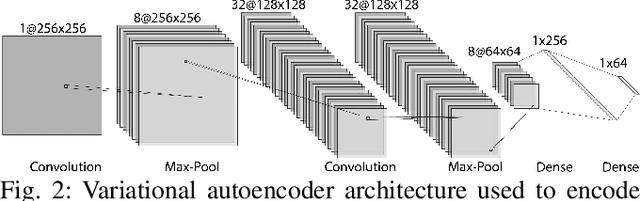

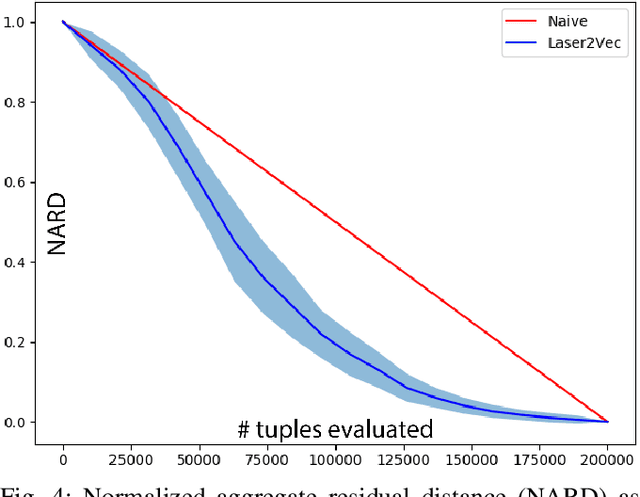
As mobile robot capabilities improve and deployment times increase, tools to analyze the growing volume of data are becoming necessary. Current state-of-the-art logging, playback, and exploration systems are insufficient for practitioners seeking to discover systemic points of failure in robotic systems. This paper presents a suite of algorithms for similarity-based queries of robotic perception data and implements a system for storing 2D LiDAR data from many deployments cheaply and evaluating top-k queries for complete or partial scans efficiently. We generate compressed representations of laser scans via a convolutional variational autoencoder and store them in a database, where a light-weight dense network for distance function approximation is run at query time. Our query evaluator leverages the local continuity of the embedding space to generate evaluation orders that, in expectation, dominate full linear scans of the database. The accuracy, robustness, scalability, and efficiency of our system is tested on real-world data gathered from dozens of deployments and synthetic data generated by corrupting real data. We find our system accurately and efficiently identifies similar scans across a number of episodes where the robot encountered the same location, or similar indoor structures or objects.
Localization under Topological Uncertainty for Lane Identification of Autonomous Vehicles
Mar 04, 2018

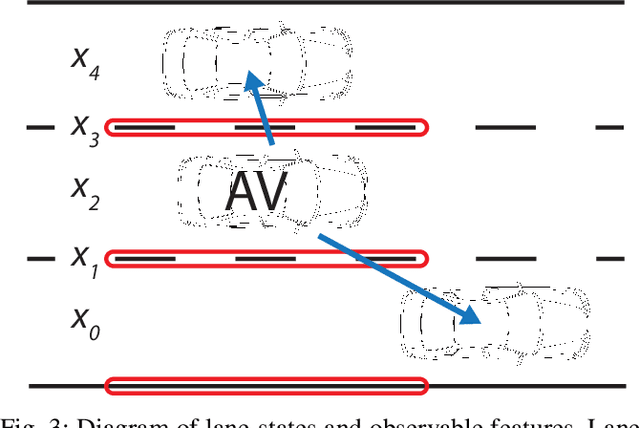

Autonomous vehicles (AVs) require accurate metric and topological location estimates for safe, effective navigation and decision-making. Although many high-definition (HD) roadmaps exist, they are not always accurate since public roads are dynamic, shaped unpredictably by both human activity and nature. Thus, AVs must be able to handle situations in which the topology specified by the map does not agree with reality. We present the Variable Structure Multiple Hidden Markov Model (VSM-HMM) as a framework for localizing in the presence of topological uncertainty, and demonstrate its effectiveness on an AV where lane membership is modeled as a topological localization process. VSM-HMMs use a dynamic set of HMMs to simultaneously reason about location within a set of most likely current topologies and therefore may also be applied to topological structure estimation as well as AV lane estimation. In addition, we present an extension to the Earth Mover's Distance which allows uncertainty to be taken into account when computing the distance between belief distributions on simplices of arbitrary relative sizes.
Human-in-the-Loop SLAM
Nov 23, 2017



Building large-scale, globally consistent maps is a challenging problem, made more difficult in environments with limited access, sparse features, or when using data collected by novice users. For such scenarios, where state-of-the-art mapping algorithms produce globally inconsistent maps, we introduce a systematic approach to incorporating sparse human corrections, which we term Human-in-the-Loop Simultaneous Localization and Mapping (HitL-SLAM). Given an initial factor graph for pose graph SLAM, HitL-SLAM accepts approximate, potentially erroneous, and rank-deficient human input, infers the intended correction via expectation maximization (EM), back-propagates the extracted corrections over the pose graph, and finally jointly optimizes the factor graph including the human inputs as human correction factor terms, to yield globally consistent large-scale maps. We thus contribute an EM formulation for inferring potentially rank-deficient human corrections to mapping, and human correction factor extensions to the factor graphs for pose graph SLAM that result in a principled approach to joint optimization of the pose graph while simultaneously accounting for multiple forms of human correction. We present empirical results showing the effectiveness of HitL-SLAM at generating globally accurate and consistent maps even when given poor initial estimates of the map.